

Konsortialtreffen November 2025 in Freiburg
Am 25. und 26. November 2025 traf sich das RoboTUNN-Konsortium zu einem produktiven Austausch am Fraunhofer-Institut für Physikalische Messtechnik (IPM) in Freiburg. Im Fokus standen der Abgleich des Projektfortschritts, intensive technische Workshops sowie die Planung der nächsten entscheidenden Schritte in Richtung roboterbasierter Tunnelinspektion und Predictive Maintenance.

Gruppenbild des RoboTUNN-Konsortiums
Fortschritte und aktuelle Entwicklungen:
Die Projektpartner präsentierten ihre aktuellen Ergebnisse:
- Das ICoM der RWTH Aachen stellt die aktuellen Entwicklungen in der Roboternavigation vor, darunter Ansätze zur Erkennung von Schienen um das Bewegungsmuster des Roboters im Tunnel zu optimieren.
- Das INATECH präsentiert den derzeitigen Stand bezüglich der Scan2BIM Verfahren sowie der entwickelten Messbox zur Aufnahme von Schäden im Tunnel.
- StatSoft berichtet zur Integration des Predictive Maintenance Ansatzes im Projekt und stellt mögliche Anwendungsgebiete dafür vor.
- albert.ing gibt Einblicke in weitere Funktionen der Squirrel CDE und möglichen Schnittstellen zur Integration von Schäden und der Roboternavigation über die CDE.
Workshops und nächste Schritte:
Ein zentraler Aspekts des Treffens war die Abstimmung in thematischen Workshops. Im Workshop zu Predictive Maintenace wurde sich zu verschiedenen Ansätzen zur Schadensbewertung und Priorisierung ausgetauscht. Dabei wurden unterschiedliche Verfahren als mögliche Ansätze zusammengetragen, welche in den kommenden Wochen für unsere Anwendungsfälle evaluiert und mit einer Entscheidungsmatrix bewertet werden sollen. Ein weiterer Workshop wurde zur physischen Integration der Messbox auf den Roboter eingeplant. Dabei wurden Themen wie Anschlussmöglichkeiten, Modularität des Systems, Stromversorgung und Schnittstellen zur Kommunikation der Systeme besprochen. Basierend darauf ist geplant, eine erste Integration der Messbox auf dem Roboter in Q1 2026 umzusetzen, wodurch erste Datenaufnahmen des Gesamtsystems möglich werden.

Abendveranstaltung: Besuch im Restaurant „Blauer Fuchs“
Dankeschön an alle Teilnehmenden für den produktiven Austausch und an das Team aus Freiburg für die hervorragende Organisation. Wir freuen uns große Fortschritte zum vorherigen Treffen zu sehen und sind gespannt auf die weiteren Ergebnisse!
Besuch beim Big-Bang KI-Festival und Datenaufnahme in Berlin

Anfang September reiste das ICoM-Team nach Berlin, um am KI-Festival teilzunehmen und die ersten robotergestützten Tests und Scans im U-Bahn-Tunnel durchzuführen. Bei der Veranstaltung wurde vielen Interessierten das Projekt nähergebracht und zugleich eine wichtige Datengrundlage für die folgenden Forschungsarbeiten aufgezeichnet.
Das KI-Festival ist eine große Austauschplattform rund um den industriellen Einsatz von Künstlicher Intelligenz. Führungskräfte, Unternehmer und Forschende aus verschiedenen Branchen teilen dort ihre Perspektiven auf den aktuellen Stand der KI-Entwicklungen sowie innovativen Anwendungsideen in ihren jeweiligen Fachgebieten. Als eines der Vorzeigeprojekte zur Anwendung intelligenter, autonomer Robotik in der Infrastruktur, leistete RoboTUNN einen besonderen Beitrag unter dem Motto:
„Wie Hightech auf vier Beinen die Verkehrswende beschleunigt – mit Live-Demo“.
Zunächst stellte unsere Projektpartnerin Larissa Zeichhardt von der LAT-Gruppe die Hintergründe des Vorhabens vor und beschrieb, wie moderne Schienensysteme vom Einsatz autonomer Roboter profitieren können. Anschließend vertiefte Fan Yang vom ICoM-Team die Diskussion mit einem konkreten Thema: Wie können Mensch und Roboter auf natürliche Weise miteinander kommunizieren und zusammenarbeiten? Diese Fragestellung wurde in einem inspirierenden Vortrag aufgeworfen, der die Zuhörenden dazu anregte, über mögliche Lösungsansätze nachzudenken. Besonders hervorzuheben war die Live-Demonstration unseres vierbeinigen Roboters „Byte“, der auf der Bühne mit dem Vortragenden Fan Yang per Sprachinteraktion kommunizierte – ein Highlight, das beim Publikum für Aufsehen sorgte. Nach dem Vortrag besuchten zahlreiche interessierte Teilnehmerinnen und Teilnehmer unseren Stand, führten anregende Gespräche über unsere Forschung und machten Fotos mit dem Roboter.
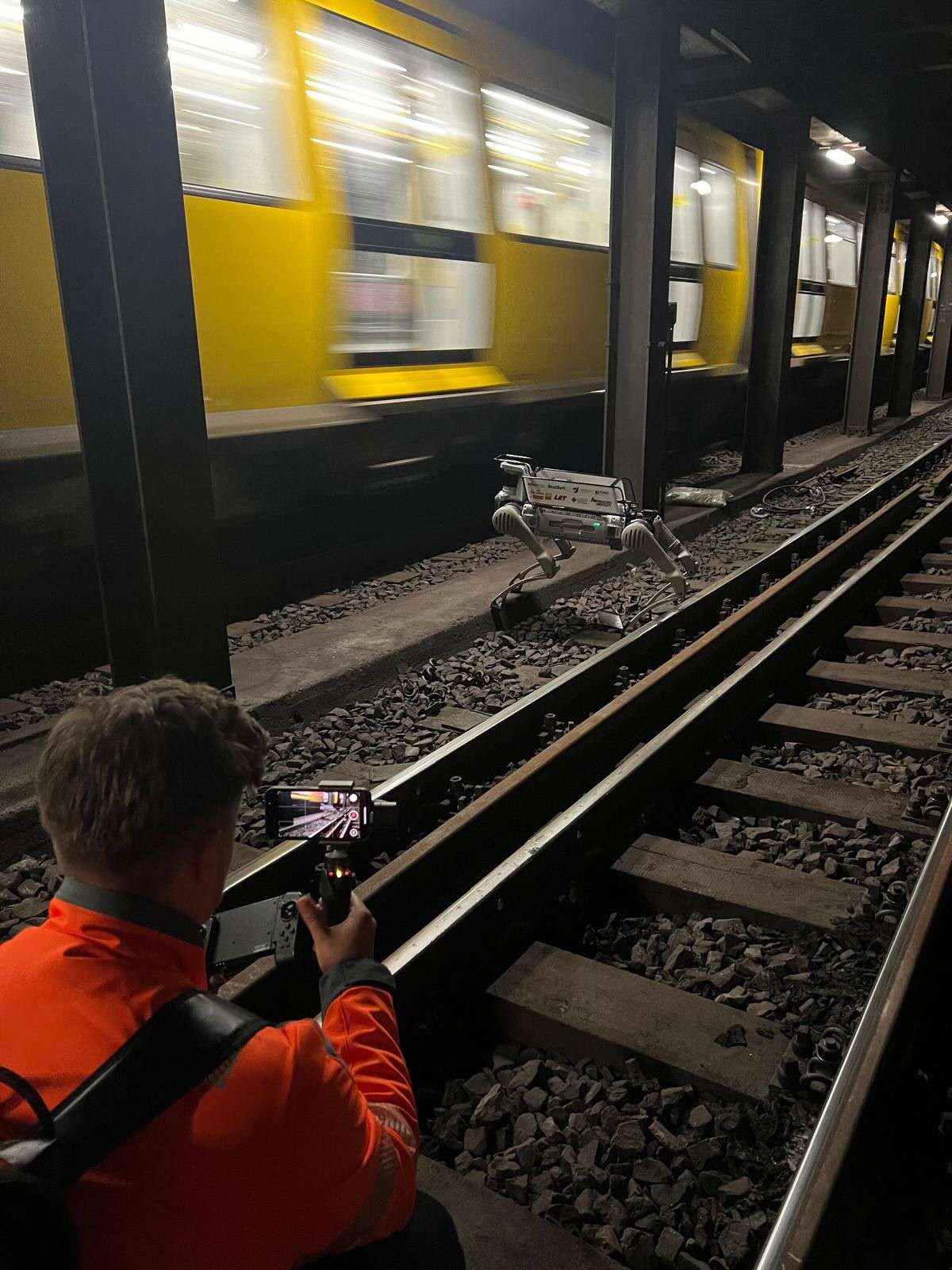
In den darauffolgenden zwei Tagen brachten wir Byte erstmals in den Berliner U-Bahn-Tunnel, wo verschiedene Tests durchgeführt wurden – darunter Bewegungstests zur Datenerfassung auf Gleisschienen, Batterieausdauer-Messungen sowie der Aufnahme eines Hindernis-Datensatzes. Die vielversprechenden Ergebnisse daraus werden im nächsten Schritt für die Weiterentwicklung des Systems aufgearbeitet.
Wir freuen uns auf die nächsten Schritte und spannende Forschungsergebnisse in der kommenden Projektphase!
Konsortialtreffen April 2025 in Aachen
Am 14. und 15. April 2025 kamen die Projektpartner des RoboTUNN-Konsortiums zu einem intensiven Austausch im SuperC der RWTH Aachen zusammen. Ziel des Treffens war die gemeinsame Standortbestimmung des Projekts sowie die Abstimmung zentraler technischer und strategischer Fragestellungen rund um die Themen digitaler Zwilling, automatisierte Schadensdetektion und robotergestützte Tunnelinspektion.

Fortschritte in Forschung und Technik
Die Projektbeteiligten präsentierten ihre bisherigen Ergebnisse:
-
RWTH Aachen stellte Entwicklungen im Bereich Mensch-Maschine-Interaktion und Roboternavigation vor, darunter sprachbasierte Steuerung (Speech-to-Action) und multimodale Modelle (VLAS).
-
StatSoft berichtete über eine umfassende Literaturrecherche zu Rissdetektion mittels KI und stellt erste entwickelte Modelle zur Risserkennung und -klassifizierung vor.
-
INATECH präsentierte erste Prototypen ihrer Sensorplattform sowie neue Ansätze für Scan2BIM-Verfahren auf Basis von Punktwolken.
-
albert.ing gab Einblicke zu Anforderungen an den Digitalen Zwilling und der Strukturierung von Tunnelmodellen in einem CDE.
Zentrale Themen und nächste Schritte
Ein Schwerpunkt des Treffens lag auf der Diskussion technischer Herausforderungen und strategischer Weichenstellungen für die nächsten Projektphasen. Insbesondere die Auswahl und Kombination geeigneter Sensorik – darunter LiDAR, RGB-Kameras und Thermalkameras – für die präzise Erkennung unterschiedlicher Schadensbilder wurde intensiv erörtert. Im Bereich der Datenverarbeitung und Systemarchitektur wurden Konzepte zur Kommunikation zwischen Roboter, Sensorplattform (Messbox) und dem zentralen Datenmanagementsystem (CDE) erstellt und konkretisiert. Am zweiten Tag gab es außerdem die Möglichkeit, den Hochleistungsrechner der RWTH Aachen (CLAIX-2023) zu besichtigen. Dieser wird im Rahmen des Projektes für das Training von rechenintensiven Machine-Learning-Modellen verwendet und bietet durch die hohe Rechenkapazität ideale Voraussetzungen für die Verarbeitung von großen Bild- und Punktwolkendatensätzen sowie für die Entwicklung von Deep-Learning-Algorithmen zur Schadensdetektion.
Mit Blick auf die kommenden Monate wurden weitere nächste Schritte vereinbart: Eine Messkampagne im Berliner U-Bahnnetz wird angestrebt, bei der zentrale Komponenten des Gesamtsystems im Realumfeld getestet und relevante Bestandsdaten erhoben werden sollen. Parallel dazu wird das nächste Konsortialtreffen im November 2025 vorbereitet.
Ein großes Dankeschön an alle Teilnehmenden für den engagierten Austausch und die produktive Zusammenarbeit! Wir freuen uns auf die nächsten Projektschritte!
