
Schlagwort: ‘leifer’
Human-robot interaction and the four-sides-model by F. Schulz von Thun
Larry Leifer lately pointed me towards the issue of human-robot relationships, which he refers to as “Hu-mimesis” in the sense, that robots might have to imitate human behavior to be accepted and trusted by its human counterparts or users, as we usually refer to them.
Larry did a great talk on hu-mimesis at mediaX at Stanford University, in which he points out three forms of dialogue in which humans and robots interact: information dialogue, emotion dialogue, and knowledge dialogue.

While this model does appeal to me as a communication scientist, I was immediately reminded of the four-sides-model, a model quite famous in Germany for interpersonal communication. It was developed by Friedemann Schulz von Thun and is also referred to as the four-ear-model [1].
The four-sides-model consists of the four sides factual information, self revelation, relationship and appeal, which all belong to a message. The idea is that messages can be sent and interpreted many-sided and that the recipient might not always understand what the sender intended to communicate.
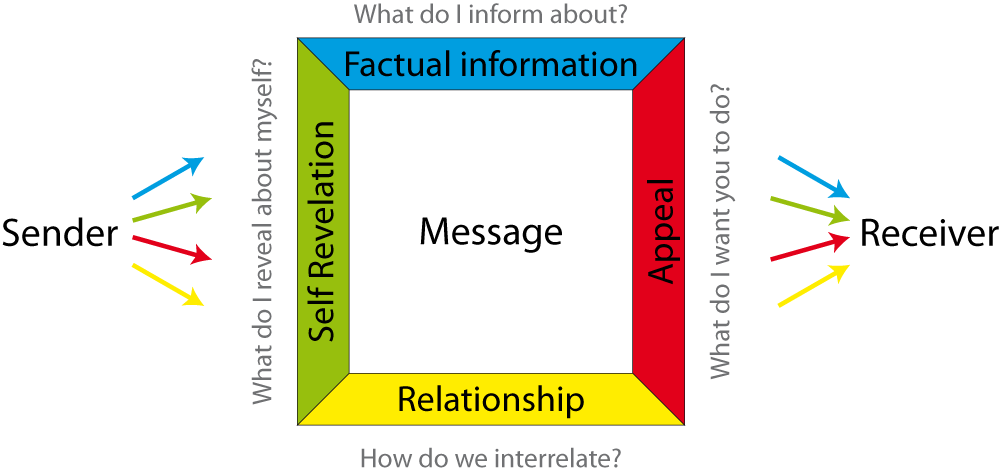
The classic example Schulz von Thun uses is a man telling his wife that “the traffic light is green”, while waiting at a junction.
Factual information: The green sign is on.
Self revelation: I want to get going.
Relationship: You need my help.
Appeal: Go!
If we want humans to trust robots such as self-driving cars (independently moving you with 100 mph or so…) we need to address all four sides. This is for the simple reason that we will rather trust a human-like (or hu-mimicked) object than a technical artefact [2].
The standard example “the traffic light is green” might just have gotten a whole new meaning…
[1] Schulz von Thun, Friedemann. 2010. Miteinander Reden 1: Störungen Und Klärungen: Allgemeine Psychologie Der Kommunikation. Auflage: 48. Rowohlt Taschenbuch Verlag.
[2] Hinds, Pamela J., Teresa L. Roberts, and Hank Jones. 2004. “Whose Job Is It Anyway? A Study of Human-Robot Interaction in a Collaborative Task.” Hum.-Comput. Interact. 19 (1). Hillsdale, NJ, USA: L. Erlbaum Associates Inc.: 151–81.
