

Schlagwort: ‘Prototypenbau’
Simulation einer teilautomatisierten, robotischen Fliesenlegehilfe
https://youtu.be/2aJtSazLz1M
Im Rahmen des ErgoFli Projekts wird in Zusammenarbeit mit Projektpartnern ein innovatives System entwickelt, das Fliesenverlegern helfen soll, ihre Arbeit ergonomischer und effizienter zu gestalten.
In dem Video könnt ihr sehen, wie das System in der Simulationsumgebung Gazebo arbeitet. Der Roboter entnimmt automatisch Fliesen aus einem Magazin und passt sie perfekt zu den bereits verlegten Fliesen an. Mit automatischen Verfahren können mehrere Fliesen hintereinander verlegt werden, um den Arbeitsprozess zu optimieren.
Unser Ziel ist es, ein Hilfsmittel zu schaffen, das nicht nur die Arbeitsbelastung für Fliesenleger reduziert, sondern auch ihre Arbeitsumgebung verbessert. Wir sind begeistert von den Fortschritten und freuen uns darauf, euch bald weitere Einblicke zu geben!
Erfahre hier noch mehr über das Projekt.
Ansprechpartner:
Mark Witte
Jan Wiartalla
Rapid Prototyping in der Entwicklung von Roboterhardware

Im Rahmen des RobWeld-Projekts wurden neue Handgelenke und Greifmechanismen für den am IGMR entwickelten und gebauten PARAGRIP entwickelt. Durch iterative Designprozesse unter Verwendung von Rapid Prototyping im 3D-Druck haben wir Funktionalitäten, Montagefreundlichkeit und die Herstellbarkeit von Komponenten perfektioniert. Das Ergebnis? Eine ausgearbeitete Konstruktion, die Stahl- und Aluminiumkomponenten vereint. In einem nächsten Schritt kann das Design nun ausgiebig getestet werden bevor es am Roboter zum Einsatz kommt.
Hier könnt ihr weitere Informationen zum Projekt RobWeld finden.
Jan Wiartalla
Teilnahme am European Robotics Forum (ERF) Hackathon 2022

Im Rahmen des European Robotics Forum (ERF) Hackathons 2022 haben sechs Studierende des IGMR ihr Talent in Prototyping und dem Umgang mit Robotern unter Beweis gestellt. Die Hackathon Aufgabe wurde unter anderem von dem Unternehmen Lely gestellt. Deren mobile Roboter „Juno“ sind autonom fahrende zylindrische Plattformen, deren Hauptaufgabe darin besteht in Agrarbetrieben die Einzäunung von Kühen abzufahren, um so das in den Raum geschobene Futtermittel wieder erreichbar zu machen. Ähnlich lautete die Aufgabenstellung im Hackathon: Zwei Juno Roboter sollen in zwei miteinander verbundenen Räumen mit einer definierten Distanz die Wände abfahren. Weitere Einschränkungen und Herausforderungen ermöglichten zusätzliche Punkte zu verdienen. Das Team konnte sich erfolgreich beim Hackathon in Rotterdam beweisen. Nach einem knappen Kopf-an-Kopf-Rennen ging der erste Platz an die TU Delft. Bei der Siegerehrung durften wir für unsere „ständige Unterstützung anderer Teams in Konstruktion und 3D Druck“ als kooperativstes Team groß gelobt werden. Dieses „beispielhafte Verhalten“ sei gerne gesehen und wir freuen uns nächstes Jahr wieder dabei zu sein.
Besonderes Lob gilt unseren Studenten Sebastian Polzin, Frederik van Kerkom, Jonas Braun, Oleksander Kutovyi, Ali Berger und Yannik Freischlad für das eingesetzte Engagement. Wir gratulieren der TU Delft zum verdienten Sieg und freuen uns über die vielen neuen Freunde und wertvolle Kontakte, die wir gewinnen konnten. Wir danken der Institutsleitung für die Möglichkeit zur Teilnahme und freuen uns auf nächstes Jahr.
Ansprechpartner:
Entwicklung neuer Handgelenke für den Paragrip
In einem gemeinsamen Forschungsprojekt des IGMR mit dem ISF der RWTH Aachen wird an der Multidirektionalen Additiven Fertigung (MDAM) metallischer Bauteile geforscht. Um den mehrarmigen Paragrip-Roboter für diesen Einsatzzweck zu optimieren hat der Student Raphael Hoffmann im Rahmen seiner Bachelorarbeit ein innovatives Konzept neuer Handgelenke erarbeitet. Dieses ermöglicht es, den Schweißstrom ohne ein sonst zusätzlich benötigtes Massekabel direkt über die Handgelenke zu leiten. Darüber hinaus ermöglichen sie ein formschlüssiges Greifen des Druckbettes mit Selbstzentrierung zum Minimieren von Positionierungsungenauigkeiten.
Weitere Informationen zu dem Projekt könnt ihr hier nachlesen.
Das Video dazu findet ihr auf unserem YouTube Kanal: https://youtu.be/VdT1rjYG4D0
Ansprechpartner:
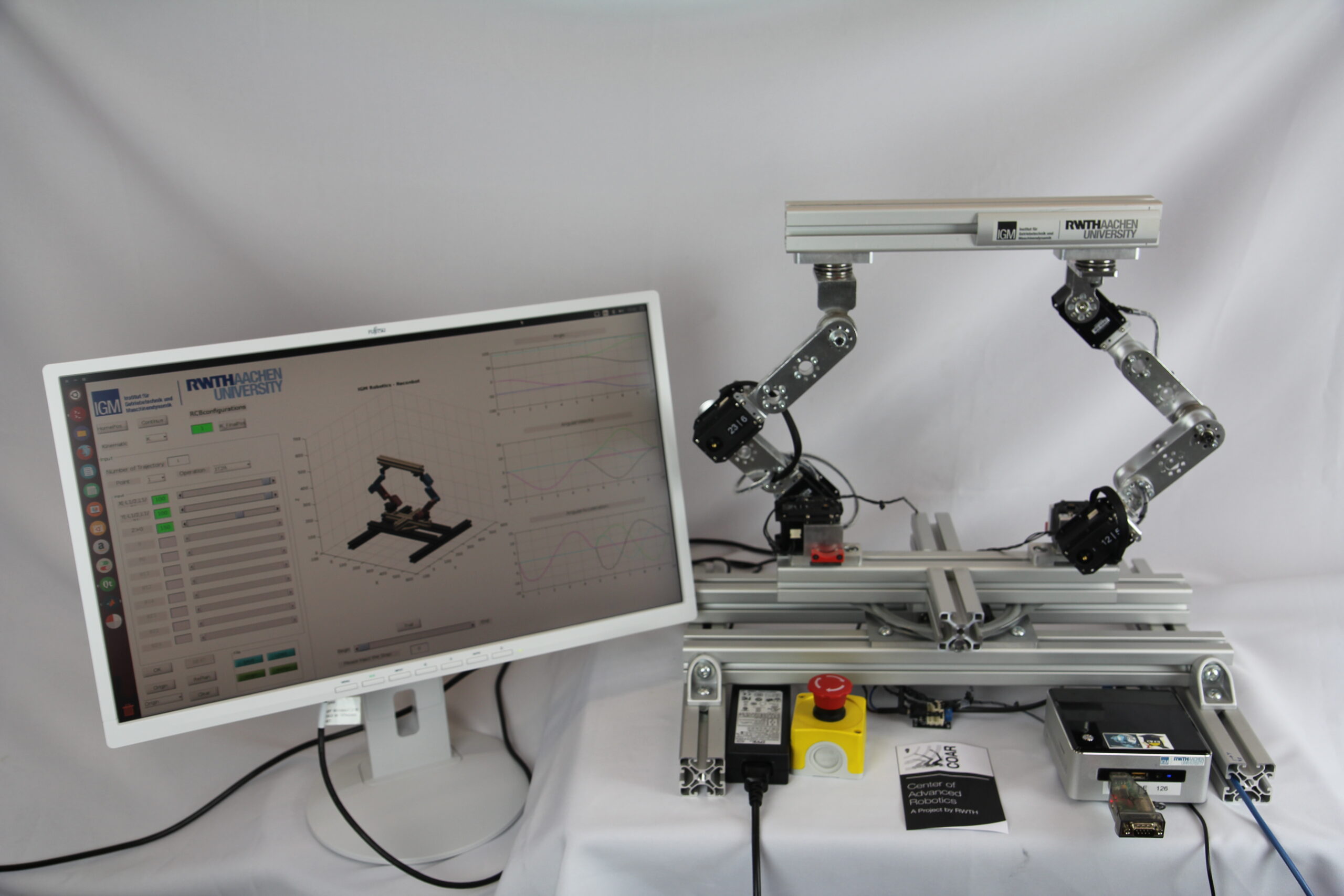
IGOR – unser hauseigener Roboter
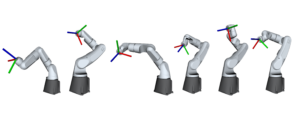
Wir haben das Konzept des hauseigenen Roboters IGOR (https://blog.rwth-aachen.de/robotik/igor-konzept-eines-hauseigenen-6-achs-roboters/) weiter entwickelt. Nun stehen verschiedene Konfigurationen des Roboters mit einer unterschiedlichen Anzahl von Freiheitsgraden zur Verfügung. Jede Konfiguration hat auch eine unterschiedliche Art von Handgelenk und Arm. Alle Modelle sind über Robot Operating System ROS steuerbar.
Ansprechpartner:
ReConBot – Ein rekonfigurierbarer Roboter
Durch die gezielte Beeinflussung der Roboterstruktur in Form von zusätzlichen Gelenken, können rekonfigurierbare Roboter synthetisiert werden. Diese zeichnen sich über zusätzliche innere Freiheitsgrade aus, welche eine innere Beweglichkeit des Roboters erlauben, ohne eine Posenänderung des Endeffektors zu bewirken. Dies wird häufig bei seriellen Strukturen zur Vermeidung von Kollisionen eingesetzt, wobei sich aber auch parallele Strukturen mit geschlossenen kinematischen Ketten dazu eignen. Am IGMR wurde der ReConBot als parallele Struktur entwickelt, welche durch die kinematische Redundanz auch für einen Strukturwechsel geeignet ist. So ist es möglich unterschiedlichste Konfigurationsräume miteinander zu verbinden und auch die Struktur von einem Vierglied oder Fünfglied zu realisieren, indem sonst aktuierte Gelenke antriebslos geschaltet werden. Der ReConBot zielt auf den hochflexiblen Einsatz in den anspruchsvollen Szenarien des Katastrophenschutz ab.
Ansprechpartner:
PeTRA – Einsatz von Mock-Ups bei den Praxispartnern


Das übergeordnete Ziel von PeTRA (Personen-Transfer Roboter-Assistent) ist die Erschaffung einer robotischen Unterstützungslösung in der Patientenlogistik zur Entlastung des Pflegefachpersonals.
Das IGMR übernimmt im Rahmen des Forschungsvorhabens unter anderem die Entwicklung und Inbetriebnahme einer Kopplungseinheit für das Koppeln des Basisfahrzeugs an Rollstühlen mit dem Ziel, diese mitsamt Patienten sicher transportieren zu können.
In der Woche vom 03. bis 06. Mai 2021 fanden erste Anwendungserprobungen des Robotersystems „PeTRA“ bei den jeweiligen Praxispartnern, Universitätsklinikum Augsburg, Barmherzige Brüder München und Martha-Maria Nürnberg, statt. Für die erste Anwendungserprobung in den Krankenhäusern haben wir in Zusammenarbeit mit KUKA ein Mock-Up des Robotersystems „PeTRA“ erstellt. Unter einem Mock-Up wird ein vereinfachtes Modell, verstanden mit welchem die Funktionen und Maße des späteren Demonstrators getestet werden kann. Das Pflegefachpersonal bekam die Möglichkeit das Mock-Up auszutesten und sich gleichzeitig in die Lage eines Patienten zu versetzen. Für die Erläuterung und technische Fragen standen wir und KUKA bereit. Weiterhin wurde das Feedback des Pflegefachpersonals durch Beobachtungen und Interviews seitens KUKA und IREM festgehalten. Das Robotersystem bzw. das Projekt stoß bei dem Pflegefachpersonal aller Praxispartner auf reges Interesse und es konnten um die 50 Interviews geführt werden. Insgesamt hat sich gezeigt, dass wir mit unserem Robotersystem in die richtige Richtung gehen. Wir konnten über die Erprobungen das Pflegefachpersonal weiterführend in den Konstruktionsprozess des Robotersystems bzw. der Koppeleinheit miteinbeziehen.
Weitere Informationen zum Projekt können den Internetseiten des Projektes und des Bundesministeriums für Bildung und Forschung entnommen werden.
Ansprechpartnerinnen:
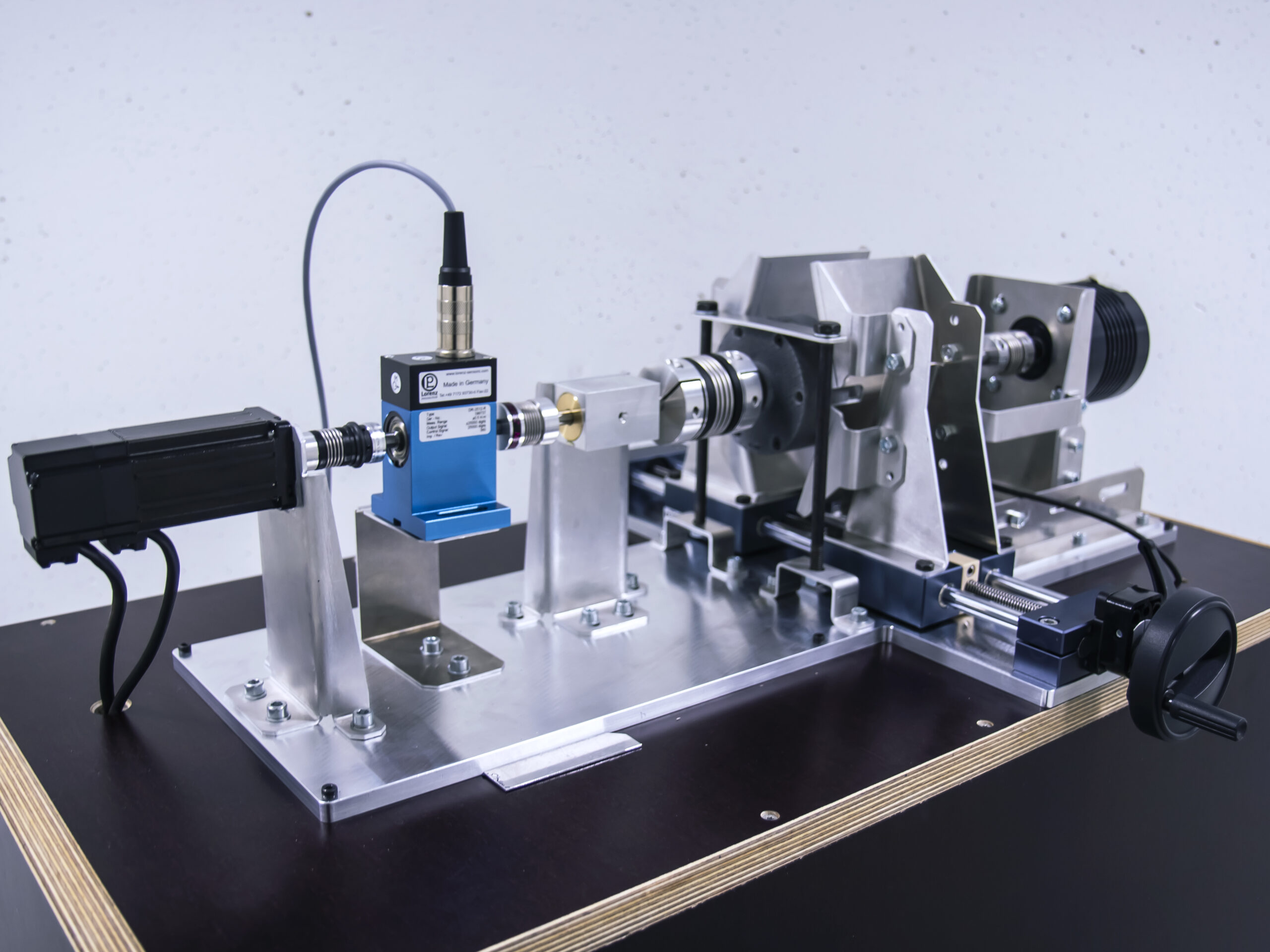
Kunststoff Cyclo-Getriebe
Am IGMR entwickeln wir performante Kunststoff-Getriebe für den Einsatz in Robotern.

In Zusammenarbeit mit der BAM GmbH arbeiten wir im Rahmen eines ZIM Projekts an der Realisierung und Optimierung eines Cyclo-Getriebes aus Kunststoff. Herausforderungen sind die schlechten Fertigungsgenauigkeiten in der additiven Fertigung und das daraus resultierenden Umkehrspiels und die Drehmomentschwankungen im Getriebe.
Mit einem am IGMR entwickelten Prüfstand sind wir in der Lage die Performance zu analysieren und kontinuierlich zu verbessern. Die Getriebe werden in Zusammenarbeit mit der TU München in einem modularen Robotersystem eingesetzt.
Ansprechpartner:
IGOR – Konzept eines hauseigenen 6-Achs-Roboters
Am IGMR haben wir einen hauseigenen Roboter entworfen, der uns in Zukunft bei virtuellen Darstellungen und Simulationen für Anträge und Forschungsprojekte unterstützen soll.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Ansprechpartner:

