Kategorie: ‘Prototypen’
April 29th, 2024 | by
Jansen, Christina
As part of the RobWeld project, new wrists and gripping mechanisms were developed for the PARAGRIP developed and built at IGMR.Through iterative design processes using rapid prototyping in 3D printing, we have perfected functionalities, ease of assembly and the manufacturability of components. The result? An elaborate design that combines steel and aluminum components.In the next step, the design can now be extensively tested before it is used on the robot.
You can find more information about the RobWeld project here.
Contact person:
Jan Wiartalla
Kategorie: Allgemein, Entwicklung, Entwicklung und Konstruktion, Greiferentwicklung, Prototypen, Prototypenbau
No Comments »

Das übergeordnete Ziel von PeTRA (Personen-Transfer Roboter-Assistent) ist die Erschaffung einer robotischen Unterstützungslösung in der Patientenlogistik zur Entlastung des Pflegefachpersonals.
Das IGMR übernimmt im Rahmen des Forschungsvorhabens unter anderem die Entwicklung und Inbetriebnahme einer Kopplungseinheit für das Koppeln des Basisfahrzeugs an Rollstühlen mit dem Ziel, diese mitsamt Patienten sicher transportieren zu können.
In der Woche vom 03. bis 06. Mai 2021 fanden erste Anwendungserprobungen des Robotersystems „PeTRA“ bei den jeweiligen Praxispartnern, Universitätsklinikum Augsburg, Barmherzige Brüder München und Martha-Maria Nürnberg, statt. Für die erste Anwendungserprobung in den Krankenhäusern haben wir in Zusammenarbeit mit KUKA ein Mock-Up des Robotersystems „PeTRA“ erstellt. Unter einem Mock-Up wird ein vereinfachtes Modell, verstanden mit welchem die Funktionen und Maße des späteren Demonstrators getestet werden kann. Das Pflegefachpersonal bekam die Möglichkeit das Mock-Up auszutesten und sich gleichzeitig in die Lage eines Patienten zu versetzen. Für die Erläuterung und technische Fragen standen wir und KUKA bereit. Weiterhin wurde das Feedback des Pflegefachpersonals durch Beobachtungen und Interviews seitens KUKA und IREM festgehalten. Das Robotersystem bzw. das Projekt stoß bei dem Pflegefachpersonal aller Praxispartner auf reges Interesse und es konnten um die 50 Interviews geführt werden. Insgesamt hat sich gezeigt, dass wir mit unserem Robotersystem in die richtige Richtung gehen. Wir konnten über die Erprobungen das Pflegefachpersonal weiterführend in den Konstruktionsprozess des Robotersystems bzw. der Koppeleinheit miteinbeziehen.
Weitere Informationen zum Projekt können den Internetseiten des Projektes und des Bundesministeriums für Bildung und Forschung entnommen werden.
Ansprechpartnerinnen:
Elodie Hüsing
Agnes Beckermann
Kategorie: Allgemein, Inklusion, Mensch-Maschine-Kollaboration, Mensch-Roboter-Kollaboration, MRK, Prototypen, Prototypenbau, Robotik in der Pflege
No Comments »
Am IGMR entwickeln wir performante Kunststoff-Getriebe für den Einsatz in Robotern.
In Zusammenarbeit mit der BAM GmbH arbeiten wir im Rahmen eines ZIM Projekts an der Realisierung und Optimierung eines Cyclo-Getriebes aus Kunststoff. Herausforderungen sind die schlechten Fertigungsgenauigkeiten in der additiven Fertigung und das daraus resultierenden Umkehrspiels und die Drehmomentschwankungen im Getriebe.
Mit einem am IGMR entwickelten Prüfstand sind wir in der Lage die Performance zu analysieren und kontinuierlich zu verbessern. Die Getriebe werden in Zusammenarbeit mit der TU München in einem modularen Robotersystem eingesetzt.
Ansprechpartner:
Markus Schmitz
Kategorie: Design of Experiments, Entwicklung und Konstruktion, Prototypen, Prototypenbau
No Comments »
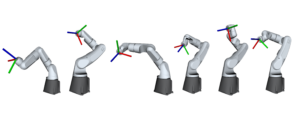
At IGMR, we have designed an In-House Robot to assist us in the Future with Virtual Renderings and Simulations for Applications and Research Projects.
Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Contact:
Markus Schmitz
Kategorie: Entwicklung und Konstruktion, IGMR, Prototypen, Roboter, Synthese
No Comments »

Das IGMR betreibt seit vielen Jahren eine eigene mechanische Werkstatt zur Fertigung von Prototypen im Bereich von Forschungs- und Entwicklungsprojekten sowie der Lehre.
Zu den Stärken des Teams zählen, die jahrelange Erfahrung der qualifizierten Mitarbeiter im Bereich der Prototypenfertigung und Montage von Baugruppen sowie die anschließende finale Installation und Inbetriebnahme der Versuchseinrichtungen und Prüfstände.
Zudem findet am IGMR innerhalb des Teams eine stetige Kommunikation zwischen der Entwicklung, Konstruktion und Produktion sowie der Integration von Elektro-, Mess- und steuerungstechnischen Komponenten statt. In der Herstellung von robotischen Systemen, Handhabungsgeräten und Bewegungsgeinrichtungen ist eine hochgenaue Fertigung, iterative Arbeitsweise und fachübergreifende Kommunikation von großer Bedeutung. Die Komponenten müssen präzise aufeinander abgestimmt werden und unterliegen einer ständigen Überprüfung innerhalb des Produktentwicklungsprozesses. Neben den herkömmlichen Zerspanungsverfahren wird in unserer Werkstatt das Verfahren des 3D-Drucks (additive Fertigung) angewendet, um je nach Anwendungsfall und Ausführbarkeit ein erstes Funktionsmuster schnell und kostengünstig zu erstellen. Die Anwendung von CAD-Systemen im Bereich der Fertigung ist selbstverständlich.
Fertigungsverfahren:
• Drehen
• Fräsen
• Bohren
• Sägen
• Sandstrahlen
• Schweißen (Elektrode)
• 3D-Druck
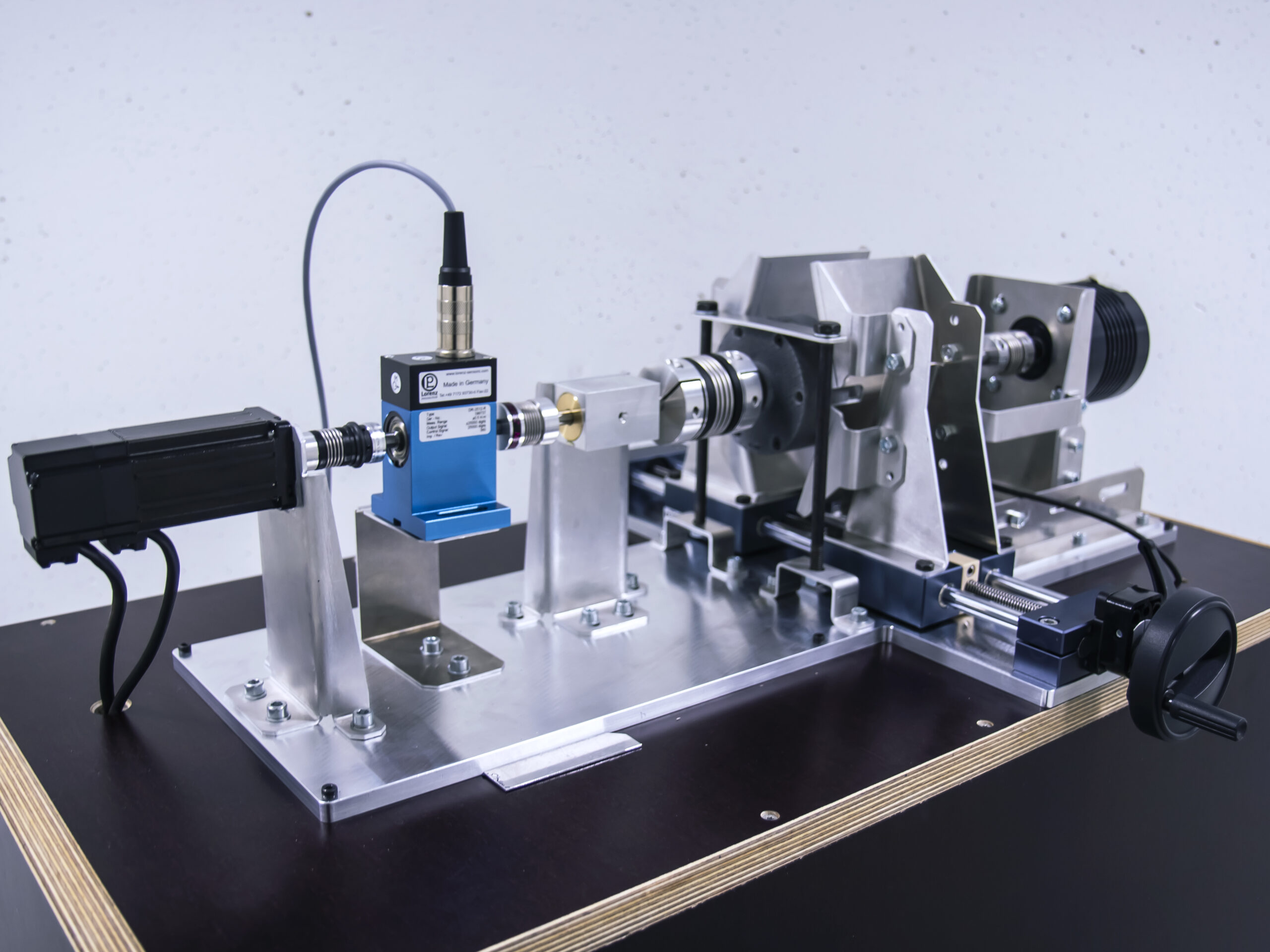
Ein Beispiel der vielfältigen Fertigungsmöglichkeiten der mechanischen Werkstatt in Kombination mit den messtechnischen Kompetenzen des IGMR zeigt die Entwicklung, Konstruktion und Anwendung eines Prüfstands zur Ermittlung der ertragbaren Lastzyklen filigraner, hochgenauer stoffschlüssiger Gelenke.
Im Rahmen des DFG-Projektes „Grundlegende Untersuchung zu stoffschlüssigen
Gelenken mit Einsatz in hochgenauen parallelkinematischen Mikromanipulatoren“ wurde ein Prüfstand zur Ermittlung der ertragbaren Lastzyklen filigraner Kerbgelenke gebaut und Lebensdaueruntersuchung durchgeführt.
Hierbei wurde die Lebensdauer stoffschlüssiger Gelenke untersucht, da diese zwar in der Feinwerktechnik weit verbreitet , aber kaum experimentellen Untersuchungen zur Lebensdauer dieser Gelenke vorhanden sind.
Der Aufbau des Prüfstandes wird in folgendem Video präsentiert:
https://youtu.be/j4ZF_1qZSUk
Besondere Herausforderung bei der Prüfstandsentwicklung waren das reproduzierbare Einsetzen der filigranen Strukturen / stoffschlüssigen Gelenke, die eindeutige Detektion der Gelenkermüdung und die automatisierte Erfassung der Messergebnisse sowie die Berücksichtigung der hohen Lastzyklen aufgrund des Dauerbetriebs.
Links:
Technikum, Labore und mechanische Werkstatt am IGMR
Veröffentlichung zum Prüfstand
Ansprechpartner:
Prof. Hüsing
Sascha Lersch
Judith Merz
Kategorie: Design of Experiments, Entwicklung und Konstruktion, Fertigung, Machbarkeitsstudien, Maschinen, Messtechnik, Prototypen, Prototypenbau, Steuerung, stoffschlüssige Gelenke, Technik, Technik und Verwaltung, Werkstatt
No Comments »