

Archiv für November 2024
Erfolgreicher Beitrag auf der „Doors & Closures in Car Body Engineering 2024!

Prof. Hüsing hielt einen Vortrag zum Thema „Efficient Kinematics Development for Door and Closure Systems“. Außerdem konnten sich die 160 Konferenzteilnehmerinnen und Konferenzteilnehmer über die effiziente Auslegung von Bewegungseinrichtungen mittels des Programms „Mechanism Developer“ (MechDev) überzeugen.
Als Dankeschön für den Vortrag wurde für Prof. Hüsing ein Baum im Auftrag des Konferenzausrichters Automotive Circle gepflanzt. 🌳💚
Ansprechpartner:
Mathias Hüsing
Innovationen in der Textiltechnik: Das DFG-Projekt SonicFibre
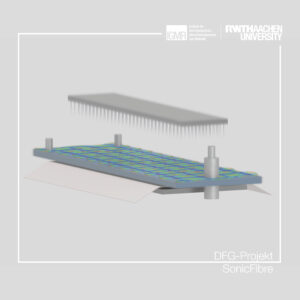
Im Rahmen unseres gemeinsamen Projekts am Institut für angewandte Mechanik (IAM) und @Institut für Textiltechnik (ITA) arbeiten wir an einer spannenden Entwicklung: der Herstellung von Vliesstoffen mit optimierter Effizienz.
💡 Die Herausforderung: Beim Vernadeln, einem zentralen Prozessschritt, werden die Fasern durch mechanische Bewegung verschränkt, um aus einem losen Faserbündel ein stabiles Vlies zu erzeugen. Dabei entstehen hohe Reibungskräfte – ein Problem, das zu Verschleiß an den Maschinenteilen führt.
🔊 Unsere Lösung: Durch die gezielte Anregung von hochfrequenten Schwingungen im Ultraschallbereich optimieren wir die Reibung zwischen den Fasern. Unser Fokus liegt darauf, eine perforierte Platte im Ultraschallbereich so zu stimulieren, dass ein geeignetes Schwingungsbild erzeugt wird – und damit den Prozess effizienter und schonender zu gestalten.
Weitere Informationen zum Projekt findet ihr hier.
Ansprechpartner:
Johannes Bolk
Automatisierte robotische Demontage – Schraubenerkennung und -entfernung für das Recycling von EV-Batterien
Vollautomatische Demontage mit Präzision!
Unser neues robotisches System revolutioniert die Demontage von E-Auto-Batterien. Mithilfe des Neura Lara 8 Roboters und modernster Bildverarbeitungstechnologien erkennen wir Schrauben vollautomatisch und positionieren den Roboter präzise, um sie sicher zu entfernen.
Durch die Integration von YOLOv8 und Intel RealSense Tiefenkameras kann das System Schrauben in Echtzeit lokalisieren und selbstständig die optimale Positionierung vornehmen. Kein manuelles Eingreifen nötig – das System arbeitet komplett autonom!
Unser Ziel: Den Recyclingprozess sicherer, schneller und effizienter zu machen. Weniger Risiken für die Arbeiter und gleichzeitig eine Maximierung der Rohstoffrückgewinnung. Das ist die Zukunft der Kreislaufwirtschaft!
Weitere Informationen zu #dimonta findet ihr hier.
Ansprechpartner:
Markus Schmitz
Daniel Gossen


