

Kategorie: ‘Simulationen’
Optimal Control to Suppress Vibrations

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
In pick-and-place tasks, which are often implemented with delta robots in industrial practice, short cycle times are desired. These lead to high accelerations of the robot and thus to high inertial forces, which cause the frame to vibrate. The frame vibrations reduce the performance and positioning accuracy of the robot and lead to material fatigue. To reduce frame vibrations, we have developed an optimal control approach that calculates vibration-reducing trajectories. To reduce vibrations, the free frame vibration is suppressed at the end of the trajectory. The chosen approach optimizes the trajectory holistically, i.e., both the geometric path and the motion law along the path are optimized. The optimization uses a multibody simulation model that was constructed with the aid of experimental system identification. Application- and robot-specific boundary conditions can be taken into account in the calculation of vibration-reducing trajectories.
contact:
Nils Brückmann
Christian Mirz
Preprint of the corresponding paper can be found here.
Further information on the Delta robot can be found here.
Semi-Automated Tile-Laying Aid

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
As part of the ErgoFli project, an innovative system is being developed in collaboration with project partners to help tile layers make their work more ergonomic and efficient.
In the video you can see how the system works in the Gazebo simulation environment. The robot automatically removes tiles from a magazine and matches them perfectly to the tiles already laid. With automatic processes, several tiles can be laid in succession to optimize the work process.
Our aim is to create a tool that not only reduces the workload for tilers, but also improves their working environment. We are excited about the progress and look forward to sharing more insights with you soon!
Find out more about the project here.
Contact person:
Mark Witte
Jan Wiartalla
Cross section group: Application Dynamics

The Application Dynamics team is made up of members from all IGMR research areas. This allows the skills in vibration analysis and machine dynamics to be optimally combined with the expertise and many years of experience in power transmission and robotics. This fusion of the Institute’s internal research priorities enables solutions to be found to problems that require both technical knowledge of dynamics and application-specific expertise. This cross section of knowledge is applied, for example, in the form of a needs-based investigation and exploitation of the dynamic effects of a system. The focus is on applications in robotics and gearing, but also covers all types of mechanical motion systems. The current research horizon ranges from kinematic redundancy and high-speed trajectories to the use of neural networks to extend the workspace through innovative object manipulation.
Contact: Johannes Bolk
Presentation of the “ErgoFli” project at the KT Colloquium 2022

The aim of the ZIM-funded project “ErgoFli” is to develop an intelligent, semi-automatic tiling aid. Its intuitive user interface, automated handling of tiles and tile adhesive, and intelligent control system are expected to reduce non-ergonomic postures by up to 66%. The ErgoFli can be moved with a motorised drive and uses linear laying kinematics to lay tiles without direct wall contact using the buttering-floating method. Tiles in two formats, 30x60 cm or 60x60 cm, can be laid in a cross bond. The robot is equipped with a tile and tile adhesive reservoir so that it can be used for at least 30 minutes without refilling and can lay 12 m2 per hour while maintaining the required standard flatness tolerances.
Using a digital twin, an early prototype has already been tested in various scenarios. While the prototype is being designed in standard CAD software, the actual model is being integrated into the Gazebo simulation environment in parallel. This enables continuous integration and testing of control system software packages in application-related scenarios. For example, real test data can be transferred to the digital twin via a closed-loop simulation. The three laser profile sensors of the tile gripper are attached to a prototype gripper and mounted on a UR10 robot arm. The measured values from the sensors can then be transferred to the digital twin in the simulation, despite the different kinematics. In this way, the position control of the gripper can be integrated into the overall system at an early stage by measuring the joint widths.
Contacts:
Jan Wiartalla
Marius Gürtler
Integrated AI task planning and screw recognition in a production scenario

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
The video is also available on our YouTube channel.
Contact:
Daniel Gossen
Development of new wrists for the Paragrip
In a joint research project of the IGMR together with the ISF of the RWTH Aachen University, the Multidirectional Additive Manufacturing (MDAM) of metallic components is being researched. In order to optimize the multi-armed. Paragrip robot for this application, student Raphael Hoffmann has developed an innovative concept of a new robotic wrist in his bachelor thesis. The concept enables the welding current to be conducted directly through the wristsm without the need for an additional ground cable attached to the print bed. Moreover, the wrists enable form fitting gripping of the print bed with self-centering to minimize positioning inaccuracies.
You can find the video on our YouTube channel: https://youtu.be/VdT1rjYG4D0
Contact:
Jan Wiartalla
WAAM simulation with ROS in Gazebo
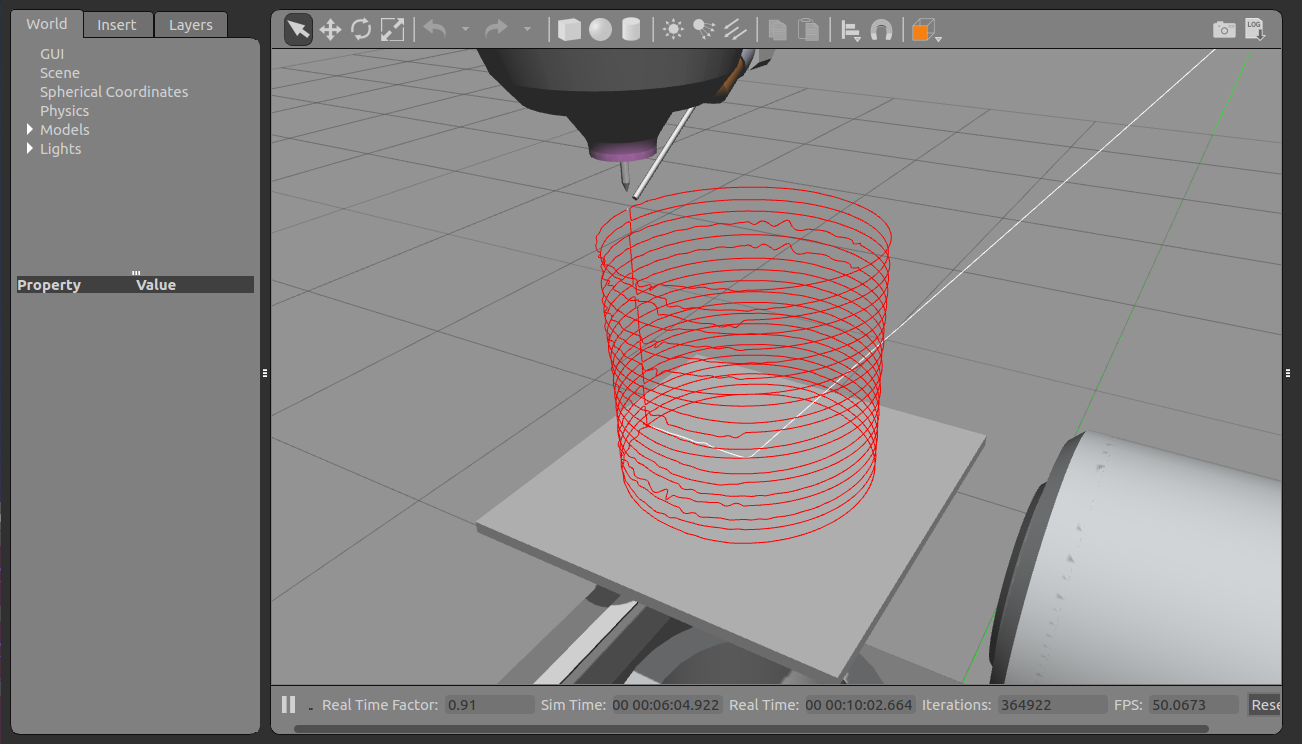
Vincent Brünjes designed a Gazebo plug-in in his master‘s thesis to simulate multidirectional wire+arc additive manufacturing processes.
Contacts:
Realistic simulations in Gazebo
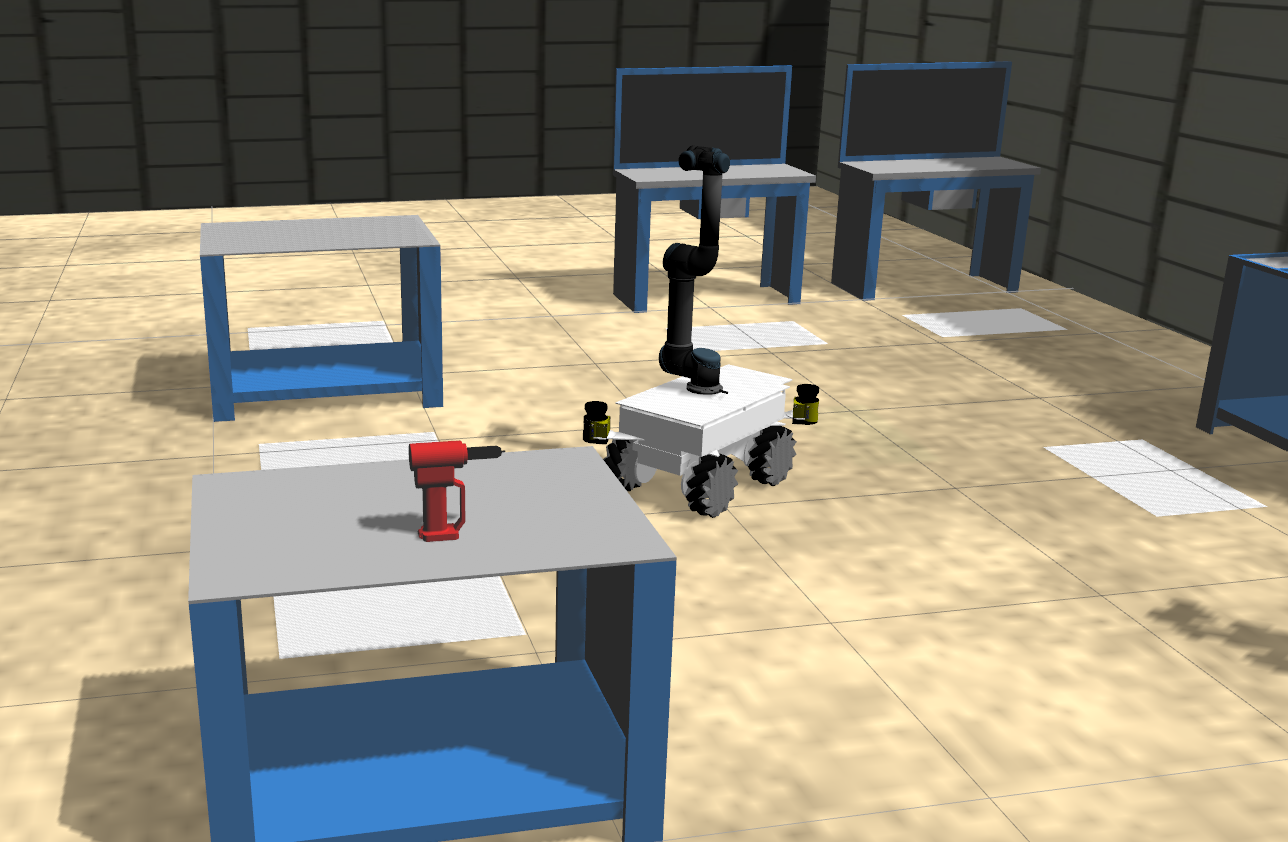
At IGMR we develop complex simulation environments. Textures make them visually more realistic in simulation program Gazebo!
Contact person:


