

Kategorie: ‘Inklusion’
IIDEA CoBot

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
In this video, Prof. Mathias Hüsing of the Institute of Mechanism Theory, Machine Dynamics and Robotics at RWTH Aachen University explains simple teaching options for collaborative robots, or CoBots for short, to support disabled and limited persons at work in the context of human-robot collaboration.
Robotics enables inclusion.
More Information about the IIDEA Project can be found at the project website
IMBA training for the IIDEA project team

Our IIDEA-project team took part in a training course on the “Integration of people with disabilities into the world of work” (IMBA).
IMBA is positioned at the interface of medical and occupational rehabilitation and enables a precise description and comparison of work requirements and human abilities. The training covered the basics of IMBA, with a particular focus on the defined characteristics that serve as the basis for the assessment of work requirements and abilities. A highlight of the training was the introduction to the “Marie Plus” software, which is closely linked to the IMBA concept. The training was conducted by Torsten Alles, Ph.D., Managing Director of iqpr. His extensive knowledge and experience helped to emphasize the importance of IMBA in occupational therapy and activity-based medical rehabilitation.
We are convinced that this training will support our previous research and make a valuable contribution to the IIDEA project. We are grateful for the expertise we have gained through this training and look forward to applying the acquired knowledge in our daily work.
contact person:
Mathias Hüsing
Carlo Weidemann
Elodie Hüsing
Sophie-Charlotte Keunecke
Christina Jansen
Project launch IIDEA – Inclusion and integration through cobots on the labor market
In April, the innovative project “IIDEA – Inclusion and integration through cobots in the first labor market” was launched, which aims to empower the inclusion and integration of severely disabled people in the first labor market through collaborative robotics.
The deployment of cobots makes it possible to create new jobs and forms of work that satisfy the individual needs of severely disabled people. These new forms of work are not being established on the margins but at the heart of digitization and Industry 4.0.
In a rapidly changing world, we must focus on the needs of all people and ensure that everyone can reach their full potential. The IIDEA project is an important step towards an inclusive and inclusive society and economy.
For more information about the project, please visit the project profile. If you have any further questions, please feel free to contact our staff: iidea@igmr.rwth-aachen.de.
Contacts:
Prof. Mathias Hüsing
Carlo Weidemann
Sophie-Charlotte Keunecke
Elodie Hüsing
Christina Jansen
Results of the project Next Generation

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
At the end of the Next Generation project, the perspectives of all those involved were collected. As always, the focus is on people. With the inclusive workplace and the collaborative robot, the project shows new perspectives for the employment of people with multiple disabilities. HRC is an enabler for inclusion in the primary labor market! We are happy about the great project results and the video reflecting them.
For more information about the project, click here.
Contacts:
Carlo Weidemann
Elodie Hüsing
Mathias Hüsing
Next Generation project wins 3rd Digital Prize

Together with our project partners Caritas Wertarbeit Köln e.V. and the Fachhochschule des Mittelstands (University of Applied Sciences for Small and Medium Enterprises), we accepted the third place in the Digital Prize and the prize money of 2,000 euros for the Next Generation project at the Futurium in Berlin on Tuesday, 3 May.
The Digital Prize is being awarded for the second time since 2019. According to the theme ‘Digital Inclusive’, the CBP aims to promote the use of digital technologies for people with disabilities and mental illnesses in the fields of disability assistance, psychiatry, politics, research, and business. At the end of the project, we are delighted to have received this award and would like to thank all those involved in and supporting the project. Next Generation is funded by the Stiftung Wohlfahrtspflege NRW, the Landschaftsverband Rheinland and the Caritasverband der Stadt Köln e.V.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Contacts:
Mathias Hüsing
Carlo Weidemann
Elodie Hüsing
Integrated AI task planning and screw recognition in a production scenario

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
The video is also available on our YouTube channel.
Contact:
Daniel Gossen
Transformation of workplaces by human-robot collaboration (HRC) at Ford

Since April 2021, employees with disabilities have been working successfully with a collaborative robot at the production line of Ford engine plant in cologne. The robot takes over the unergonomic pressing of the VCT solenoids into the engine cover and the employee installs the screws. During this process, humans and robots work simultaneously in the same workspace. The key findings and results of the project are summarized in the strategy paper.
Further information on the project can be found here.
Contact:
Teilnahme am A+A Kongress in Düsseldorf

Presentation of the Next Generation Workplace and lecture on “HRC as a tool for inclusive workplaces
At the A+A Congress in Düsseldorf, we presented the Next Generation project together with Caritas Wertarbeit Köln. The congress is attended by many interested parties and experts in the field of occupational health and safety and stimulates dialogue with many exciting presentations on current topics in these areas. On both days of the A+A Congress there were many discussions with interested participants. On the final day, Carlo Weidemann also gave a presentation on “Human-Robot Collaboration as an Assistive Medium for Inclusive Workplaces“. In addition to explaining the motivation behind the design of inclusive workplaces, this presentation also covered the inclusion projects that the IGMR is supporting and helping to shape. These are the Next Generation Project and the project with Ford to reorganise a workplace for employees who have undergone a performance change.
Contact
Next Generation: virtueller Messestand zum inklusiven Arbeitsplatz
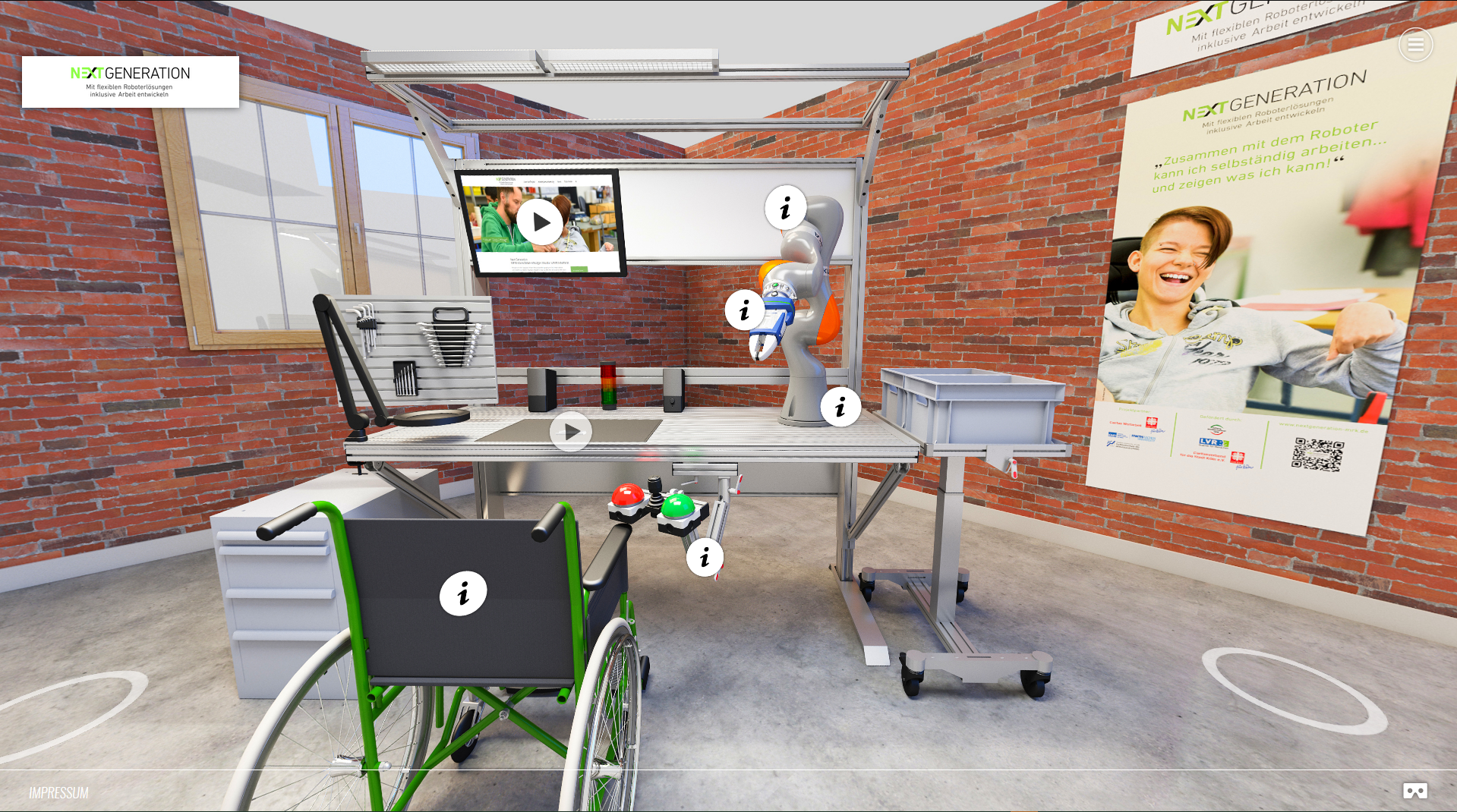
Robotervorstellung im Projekt Next Generation
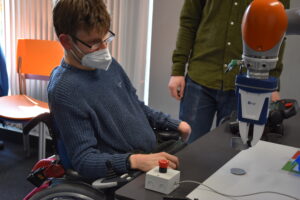
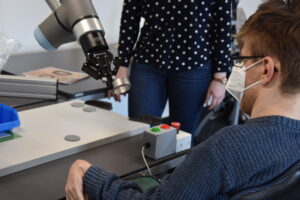
In Köln haben die Teilnehmenden zum ersten Mal die Roboter kennengelernt. Die Begeisterung und Spannung bei allen Beteiligten war groß.
Im Rahmen der Robotervorstellung hatte jeder Teilnehmende eine Stunde Zeit, mit den Roboter in beispielhaften Anwendungen zu arbeiten. Dazu haben wir den KUKA LBR iiwa 7 und den Universal Robot UR10e mit einer unserer Musteranwendungen programmiert, bei denen die Teilnehmenden gute und schlechte Bauteile visuell prüfen mussten. Der Roboter dient dabei als Assistenzmedium und hat den Teilnehmenden die Bauteile angereicht und abgelegt oder gehalten und gedreht, je nachdem ob die Teilnehmenden das Bauteil selber handhaben konnten oder nicht.
In einer dritten Anwendung gab es die Möglichkeit den Kinova Jaco² per Joystick zu steuern und Bauteile zu greifen. Obwohl die Joysticksteuerung großen Anklang fand, muss die Bewegungskoordination noch geübt werden. Mit diesem Ergebnis ist klar, dass für die beiden anderen Roboter auch eine Joystick-Steuerung wünschenswert ist. Angedacht ist darum, den Teilnehmenden die Positionierung und Drehung des Bauteils mit dem Joystick zu ermöglichen, um den visuellen Prüfprozess zu verbessern. Bisher dreht der Roboter das Bauteil in festgelegten Intervallen, bevor eine Eingabe über Taster erfolgen kann.
Ein Video mit weiteren Eindrücken der Robotervorstellung gibt es demnächst hier im Robotik Blog zu sehen.
Weitere Informationen und Bilder zur Robotervorstellung sind auf der Projektwebsite zu finden.
Internetseite des Projektes NextGeneration
Ansprechpartnerinnen und Ansprechpartner


