

Kategorie: ‘künstliche Intelligenz’
Automated robotic dismantling/disassembly – screw detection and removal for electric vehicle recycling
Fully automatic disassembly with precision!
Our new robotic system is revolutionizing the disassembly of electric car batteries. Using the Neura Lara 8 robot and the latest image processing technologies, we recognize screws fully automatically and position the robot precisely to remove them safely.
Thanks to the integration of YOLOv8 and Intel RealSense depth cameras, the system can locate screws in real time and position them optimally on its own. No manual intervention necessary – the system works completely autonomously!
Our goal: to make the recycling process safer, faster and more efficient. Fewer risks for workers and maximizing the recovery of raw materials at the same time. This is the future of the circular economy!
You can find more information about #dimonta here.
contact:
Markus Schmitz
Daniel Gossen
MobiLamas

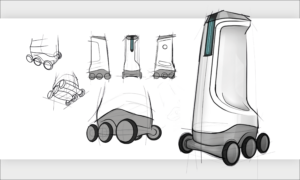
MobiLamas is a concept for free-float charging in the city of the future. In our vision, individual transport will shift from cars to public transport, complemented by so-called last-mile vehicles (e.g., electric bikes or scooters). In such environments, ecological and economical solutions are needed to enable safe and smart charging for a variety of devices. MobiLamas are intelligent mobile robots that interact with last-mile vehicles and charging stations, and safely navigate urban spaces in the presence of pedestrians.
Contact:
Frohe Weihnachten und frohes neues Jahr!


Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Wir wünschen euch eine schöne Weihnachtszeit und einen guten Rutsch ins neue Jahr! Bleibt gesund 💙 #merrychristmas #happynewyear
Ansprechpartner:
AI task scheduling explained
Artificial Intelligence task scheduling explained using an industry scenario.
https://youtu.be/qNDgJc1XUPM
The Automated Task Planning is intended to support the use of robots in flexible environments.
Traditional robot programming as a sub-area of work preparation processes poses great challenges to individual productions with small quantities. Automated Task Planning promises to address the problems.
In the video, in addition to the introduction and classification of Automated Task Planning, the steps required for its implementation and the benefits that result from its use are presented.
The concept was validated during research at IGMR using a simulation, which is used in the examples in the video.
Contact person:
IGMR-Seminar 11.05.2021, 16:00 – 17:00 Uhr: Task Planning, Environment Representation and Reasoning in Agricultural and Industrial Robotics
Wir freuen uns Oscar Lima vom DFKI (Deutsches Forschungszentrum für Künstliche Intelligenz) aus Osnabrück als Vortragender beim nächsten Termin der IGMR Vortragsreihe im Sommersemester 21 zu haben. Der Titel seines Vortrags lautet Task Planning, Environment Representation and Reasoning in Agricultural and Industrial Robotics.
The focus of the talk will be on DFKI Osnabrück projects. Most of our work is related to agricultural robotics, perception, environment representation, reasoning and task planning. We start the talk with the concept of precision farming, how robots can assist there, to then look into route planning, environment representation, and some of its applications in navigation and expert systems. At the end of the talk we will finish with projects that are related with industry 4.0 and one which aims to provide a generic tool for AI planning in Europe. The talk is light and conceptual, I hope to catch your attention with interesting and new ideas!
Zoom Meeting Informationen:
11.05.2021, 16:00 – 17:00 Uhr
https://rwth.zoom.us/j/95798557131?pwd=WDNoUmxLV3h4R2JTWVZWMWNSajhNZz09
Meeting-ID: 957 9855 7131
Kenncode: 917617
Die Datenschutzhinweise zur Nutzung von Zoom und eine Handreichung für Teilnehmer (Studierende) können von den Seiten des CLS der RWTH Aachen University heruntergeladen werden.
Die Veranstaltungen werden in Zusammenarbeit mit dem VDI-GPP-Arbeitskreis des Bezirksvereins Aachen durchgeführt.


