

Archive for March, 2022
IGOR – our in-house robot
Markus Schmitz
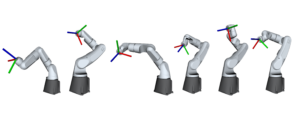
How construction site robots work on a wall
The in-house developed robot has 7 degrees of freedom, which are realized exclusively via revolute joints. Due to the redundancy, the robot can also develop its full performance in narrow situations such as corridors or niches. The video on the left shows a vertical trajectory in which the robot works on a wall from the floor to a height of 2.50m. The video on the right shows the horizontal trajectory of a wall immediately in front of the robot.
More information about this project can be found on the IGMR Website.
Contact person:
Lösungen der Praktischen Übungen in Robotic Systems
Auch in diesem Jahr haben uns wieder kreative Lösungen für Problemstellungen aus dem Modul Robotic Systems erreicht. Die Studierenden konnten erste Erfahrungen bei der Programmierung eines Fanuc Roboters in Roboguide sammeln. Eine Umfangreiche Programmieraufgabe galt es weiterhin an der Fanuc Education Cell zu lösen. Auf Grund der Einschränkungen der Präsenzveranstaltungen mussten alle Lösungen virtuell in Roboguide gelöst werden. Im nächsten Winter wird dann wieder am realen Roboter erprobt.
Ansprechpartner:


