

Archive for September, 2020
Next Generation – developing inclusive work with flexible robot solutions
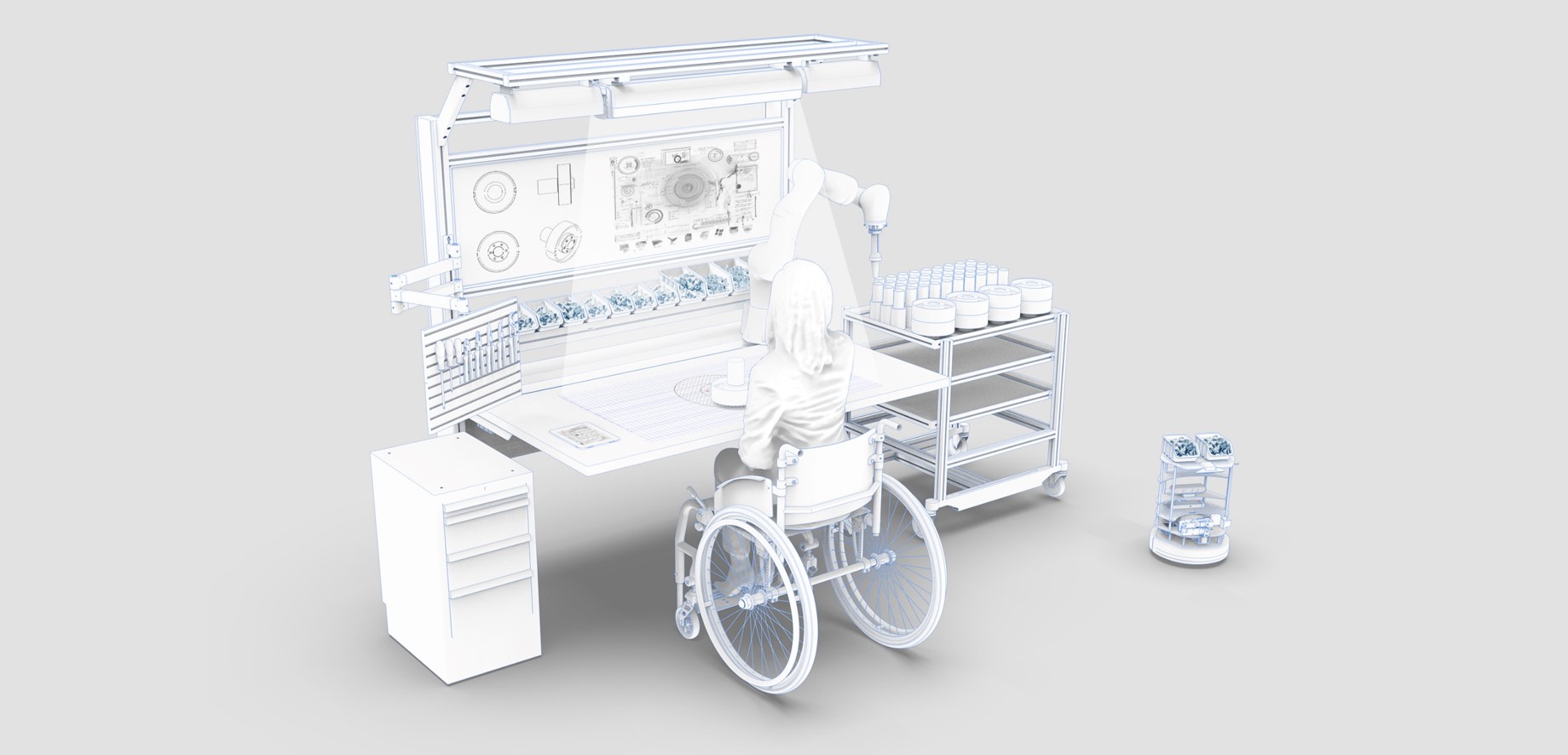
Person sits at a production workplace and is supported by a collaborative robot.
The Next Generation project aims to develop inclusive workplaces with the help of human-robot collaboration (HRC) in order to improve the quality of life.
People with severe and multiple disabilities usually work below their personal cognitive abilities. This causes great dissatisfaction.
For this reason, the project “Next Generation – developing inclusive work with flexible robot solutions” develops workplaces with the aid of human-robot collaboration (HRC).
The project is intended to enable people with disabilities to participate in working life. This can increase the quality of life as well as self-determination and positive personality development.
For tasks from industry, numerous companies from the Cologne area were asked to provide possible sample applications for the conception of the inclusive workplace.
In the process, two activities at Buschhoff Stanztechnik GmbH & Co. KG and at Cölner Hofbräu P. Josef Früh KG were selected. The conception and implementation can now begin. Further up-to-date information is available on the website of the Next Generation project.
Website Next Generation-Project.
Contacts:
Driverless transport systems
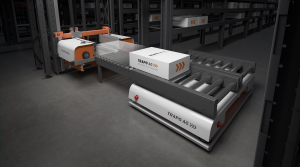
Image source: TRAPO AG
Autonomous transportations systems are being integrated into modern plants and warehouses. Trapo AG has developed with the support of IGMR of RWTH Aachen University a leading product in the industry, the Trapo Transport Shuttle (TTS). The IGMR staff was involved in the development and integration of the localization and navigation algorithms, in the creation of the state machines that determine the behavior of the TTS, and in the intensive testing phases. All methods and algorithms were integrated and configured in the ROS middleware. The whole system has already been successfully put into operation at the customer.
Contact person:
Stefan Bezrucav
Markus Schmitz


