

Archiv für September 2020
Next Generation – mit flexiblen Roboterlösungen inklusive Arbeit entwickeln
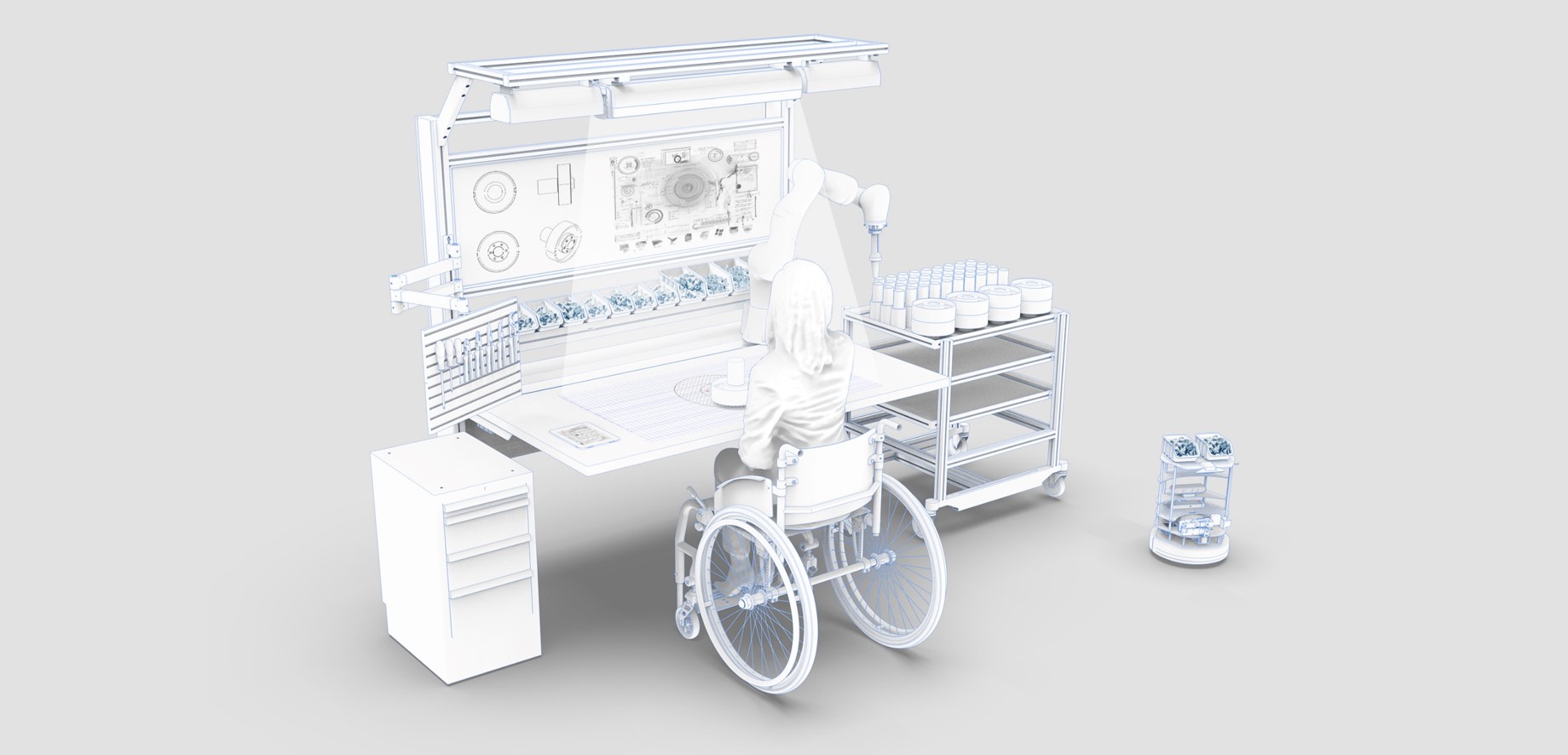
Das Projekt Next Generation verfolgt das Ziel inklusive Arbeitsplätze mithilfe von Mensch-Roboter-Kollaboration (MRK) zu
entwickeln, um Lebensqualität zu steigern.
Menschen mit Schwerst- und Mehrfachbehinderung arbeiten meist unterhalb ihren
persönlichen kognitiven Fähigkeiten. Dies sorgt bei den Betroffenen für große Unzufriedenheit.
Aus diesem Grund gilt es innerhalb des Projekts „Next Generation – mit flexiblen
Roboterlösungen inklusive Arbeit entwickeln“ Arbeitsplätze mithilfe von Mensch-Roboter-
Kollaboration (MRK) zu entwickeln. Das Projekt soll Menschen mit Behinderung ermöglichen, am
Arbeitsleben teilzunehmen. Dies kann sowohl die Lebensqualität steigern als auch
Selbstverwirklichung, Selbstbestimmung und eine positive Persönlichkeitsentwicklung mit sich
führen.
Für Aufgaben aus der Industrie wurden zahlreiche Unternehmen aus dem Großraum Köln
gebeten, mögliche Musteranwendungen für die Konzeption des inklusiven Arbeitsplatzes zur
Verfügung zu stellen. Dabei wurden zwei Tätigkeiten zum einen bei der Buschhoff Stanztechnik
GmbH & Co. KG und zum anderen bei der Cölner Hofbräu P. Josef Früh KG identifiziert. Die
Konzeption und Umsetzung kann nun beginnen. Weitere aktuelle Informationen gibt es auf der
Website des Next Generation-Projektes.
Ansprechpartner:
Fahrerlose Transportsysteme
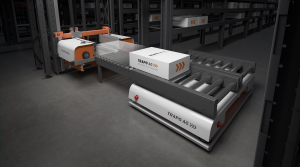
Bildquelle: TRAPO AG
Fahrerlose Transportsysteme werden immer häufiger in modernen Anlagen und Lager integriert. Trapo AG hat ein führendes Produkt in der Branche, der Trapo Transport Shuttle (TTS), mit der Unterstützung vom IGMR der RWTH Aachen entwickelt. Die Mitarbeiter des IGMR waren bei der Entwicklung und Integration von den Lokalisierung- und Navigationsalgorithmen, bei der Erstellung der Zustandsmaschinen, durch welchen das Verhalten vom TTS bestimmt ist, und bei den intensiven Testphasen involviert. Alle Methoden und Algorithmen wurden in der ROS Umgebung integriert und konfiguriert. Das ganze System wurde schon erfolgreich beim Kunde im Betrieb genommen.
Ansprechpartner:
Stefan Bezrucav
Markus Schmitz


