

Kategorie: ‘Next Generation’
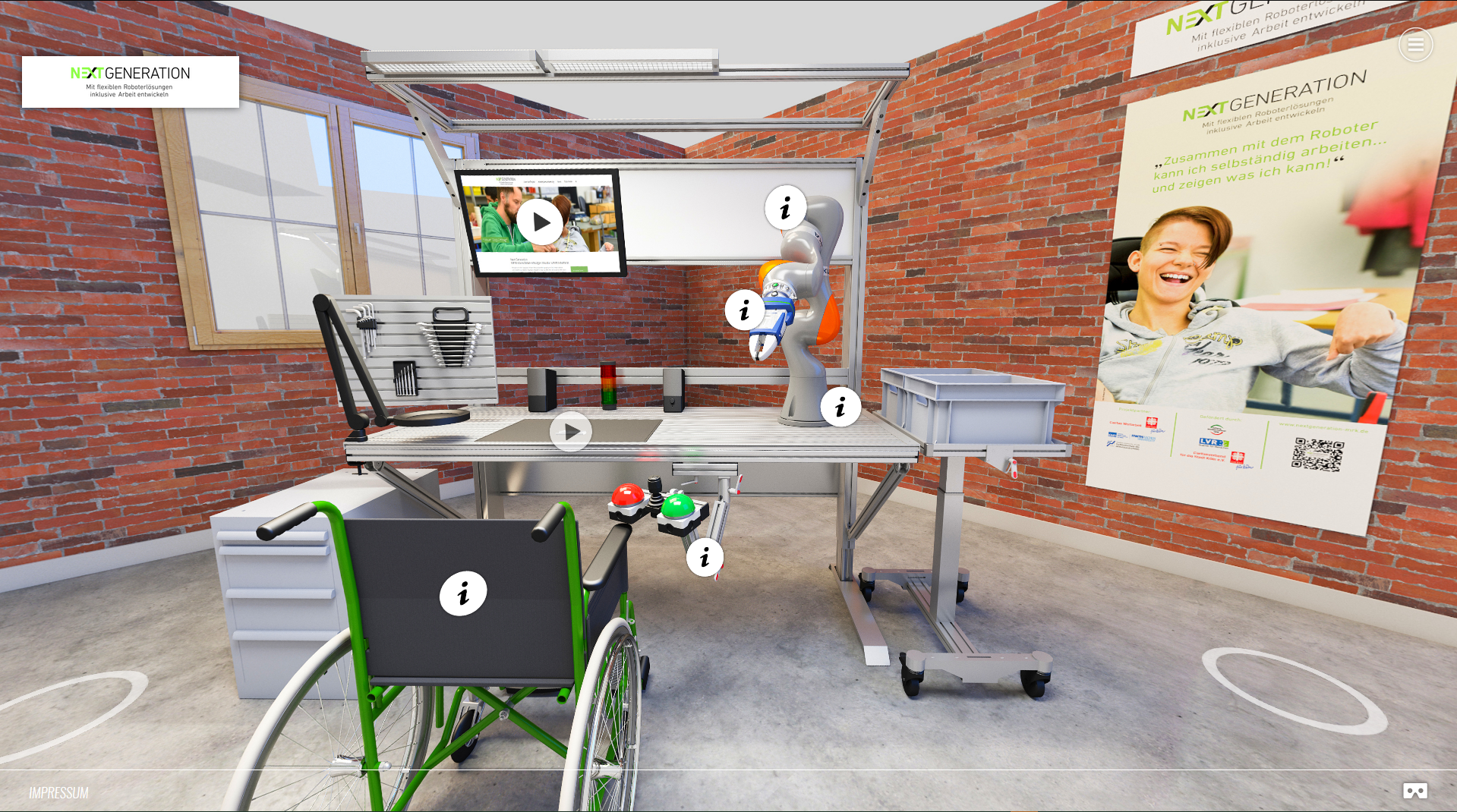
Next Generation: virtueller Messestand zum inklusiven Arbeitsplatz
Robotervorstellung im Projekt Next Generation
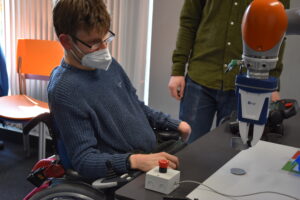
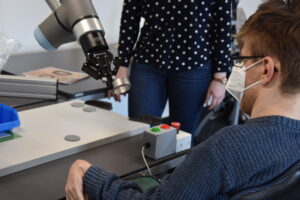
In Köln haben die Teilnehmenden zum ersten Mal die Roboter kennengelernt. Die Begeisterung und Spannung bei allen Beteiligten war groß.
Im Rahmen der Robotervorstellung hatte jeder Teilnehmende eine Stunde Zeit, mit den Roboter in beispielhaften Anwendungen zu arbeiten. Dazu haben wir den KUKA LBR iiwa 7 und den Universal Robot UR10e mit einer unserer Musteranwendungen programmiert, bei denen die Teilnehmenden gute und schlechte Bauteile visuell prüfen mussten. Der Roboter dient dabei als Assistenzmedium und hat den Teilnehmenden die Bauteile angereicht und abgelegt oder gehalten und gedreht, je nachdem ob die Teilnehmenden das Bauteil selber handhaben konnten oder nicht.
In einer dritten Anwendung gab es die Möglichkeit den Kinova Jaco² per Joystick zu steuern und Bauteile zu greifen. Obwohl die Joysticksteuerung großen Anklang fand, muss die Bewegungskoordination noch geübt werden. Mit diesem Ergebnis ist klar, dass für die beiden anderen Roboter auch eine Joystick-Steuerung wünschenswert ist. Angedacht ist darum, den Teilnehmenden die Positionierung und Drehung des Bauteils mit dem Joystick zu ermöglichen, um den visuellen Prüfprozess zu verbessern. Bisher dreht der Roboter das Bauteil in festgelegten Intervallen, bevor eine Eingabe über Taster erfolgen kann.
Ein Video mit weiteren Eindrücken der Robotervorstellung gibt es demnächst hier im Robotik Blog zu sehen.
Weitere Informationen und Bilder zur Robotervorstellung sind auf der Projektwebsite zu finden.
Internetseite des Projektes NextGeneration
Ansprechpartnerinnen und Ansprechpartner
Digitaltag am 18.06.2021

Am Freitag, den 18.06.2021 nehmen wir im Rahmen des Projektes NextGeneration am Digitaltag der Caritas Köln teil.
Es werden folgende drei Veranstaltungen live, über den Facebook-Kanal der Caritas gestreamt:
DIESE WOCHE FREITAG UM 11:00
Online Live-Veranstaltung: mit dem DigiBus Digitale Teilhabe ermöglichen
DIESE WOCHE FREITAG UM 13:00
Online-Live-Veranstaltung: Roboterlösungen in der inklusiven Arbeit
DIESE WOCHE FREITAG UM 15:00
Online Live-Veranstaltung: VR Brillen in der Altenpflege
Weitere Informationen:
Caritasverband für die Stadt Köln e.V. | Digitaltag (caritas-koeln.de)
Aktive Kollisionsvermeidung in der Mensch-Roboter-Kollaboration
Vor dem Hintergrund der Mensch-Roboter-Kollaboration untersucht das IGMR der RWTH Aachen innovative Ansätze zur sicheren Gestaltung teilautomatisierter Montage- und Produktionsprozesse.
Marktübliche Cobots sind in der Regel mit einer Geschwindigkeits- und Abstandsüberwachung beziehungsweise einer Leistungs- und Kraftbegrenzung nach ISO/TS 15066 ausgestattet. Entsprechende Roboter reagieren demnach im Gefährdungs- oder Kollisionsfall mit einer Reduktion der Prozessgeschwindigkeiten beziehungsweise mit einem Betriebshalt, wodurch industrielle Prozesse im Zweifel nachteilig beeinflusst werden.
Der hier vorgestellte Ansatz zeigt deshalb, wie sich Kollisionen zwischen Mensch und Roboter aktiv vermeiden lassen. Das Verfahren nutzt die kinematische Redundanz des KUKA LBR iiwa, um sensorisch erfassten Hindernissen durch die innere Rekonfiguration der Roboterkinematik auszuweichen. Die Trajektorie des Endeffektors wird dabei nicht verändert, sodass der vorgegebene Prozessablauf erhalten bleibt. In diesem Zusammenhang lassen sich alternative Sicherheitskonzepte entwickeln, die eine kollisionsfreie Automatisierung im Rahmen der Mensch-Roboter-Kollaboration ermöglichen.
Aktive Kollisionsvermeidung mit dem KUKA LBR iiwa – Referenzbewegung ohne Hindernisumfahrung:

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Aktive Kollisionsvermeidung mit dem KUKA LBR iiwa – optimierter Bewegungsverlauf mit Hindernisumfahrung durch kinematische Rekonfiguration:

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Ansprechpartner:
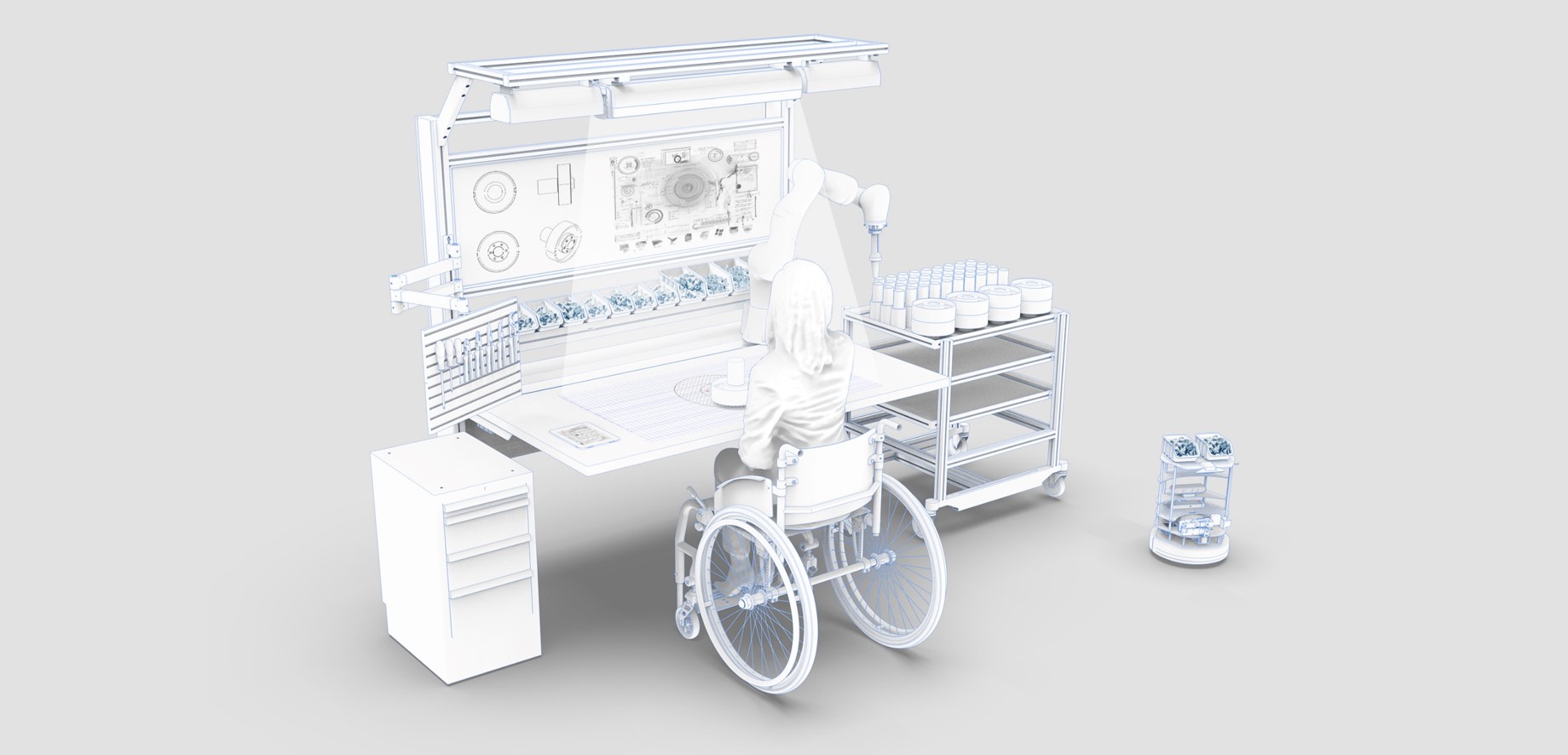
Aufbau der Next Generation Arbeitsplätze

Die Lieferung der Arbeitsplätze ist erfolgt, sodass der Aufbau und die Programmierung beginnen kann.
Kurz vor Weihnachten sind die Arbeitsplätze und das Zubehör beim IGMR der RWTH Aachen angekommen. Somit hat der Aufbau des Arbeitsplatzes begonnen und die Programmierung der Roboter für die Musteranwendungen kann starten.
Dazu sind der KUKA LBR iiwa 7 und der KINOVA JACO2 am Arbeitsplatz befestigt worden und werden für die verschiedenen Greifer (Adaptivgreifer, Parallelgreifer und 2-Finger-Greifer) sowie Bedienelemente konfiguriert. Zusätzlich werden die Roboter für die Musteranwendung der Industrieunternehmen programmiert. Die modulare Programmierung ist dabei essentiell, um die Teilnehmenden entsprechend ihrer Bedürfnisse bestmöglich zu unterstützen.
Im März 2021 werden die Teilnehmenden im Rahmen eines dreitägigen Workshops die Roboter kennenlernen und erproben. Mit den gewonnenen Erkenntnissen aus dem Erstkontakt wird der Arbeitsplatz entsprechend angepasst, damit die Roboter Mitte des Jahres in den Werkstätten der Caritas Wertarbeit Köln zum Einsatz kommen.
Projektseite: https://www.nextgeneration-mrk.de/
Ansprechpartner:
Next Generation – mit flexiblen Roboterlösungen inklusive Arbeit entwickeln
Das Projekt Next Generation verfolgt das Ziel inklusive Arbeitsplätze mithilfe von Mensch-Roboter-Kollaboration (MRK) zu
entwickeln, um Lebensqualität zu steigern.
Menschen mit Schwerst- und Mehrfachbehinderung arbeiten meist unterhalb ihren
persönlichen kognitiven Fähigkeiten. Dies sorgt bei den Betroffenen für große Unzufriedenheit.
Aus diesem Grund gilt es innerhalb des Projekts „Next Generation – mit flexiblen
Roboterlösungen inklusive Arbeit entwickeln“ Arbeitsplätze mithilfe von Mensch-Roboter-
Kollaboration (MRK) zu entwickeln. Das Projekt soll Menschen mit Behinderung ermöglichen, am
Arbeitsleben teilzunehmen. Dies kann sowohl die Lebensqualität steigern als auch
Selbstverwirklichung, Selbstbestimmung und eine positive Persönlichkeitsentwicklung mit sich
führen.
Für Aufgaben aus der Industrie wurden zahlreiche Unternehmen aus dem Großraum Köln
gebeten, mögliche Musteranwendungen für die Konzeption des inklusiven Arbeitsplatzes zur
Verfügung zu stellen. Dabei wurden zwei Tätigkeiten zum einen bei der Buschhoff Stanztechnik
GmbH & Co. KG und zum anderen bei der Cölner Hofbräu P. Josef Früh KG identifiziert. Die
Konzeption und Umsetzung kann nun beginnen. Weitere aktuelle Informationen gibt es auf der
Website des Next Generation-Projektes.
Ansprechpartner:


