

Archive for March, 2021
Erste FDM Druckversuche im Rahmen der Multidirektionalen Additiven Fertigung
Die ersten Hürden des prototypischen Aufbaus sind geschafft. Nun kann die entwickelte Prozessvorbereitung getestet werden.
https://youtu.be/WlblPv46NG4
Im Rahmen des DFG geförderten Projekts soll die Multidirektionale Additive Fertigung für das Lichtbogenschweißen erforscht werden. Die Prozessvorbereitung soll nun zunächst im FDM Verfahren validiert werden.
Ansprechpartner:
Geplanter Umbau des Paragrip

Um für seine neue Aufgabe in der Additiven Fertigung mittels Lichtbogenschweißen (WAAM) optimal gewappnet zu sein, muss der Paragrip einigen konstruktiven Änderungen unterworfen werden.
In einem gemeinsamen Forschungsprojekt des IGMR mit dem ISF der RWTH Aachen wird an der Multidirektionalen Additiven Fertigung (MDAM) metallischer Bauteile geforscht. Durch das Bewegen des Druckbettes mittels eines Manipulators bei gleichzeitig feststehender Schweißpistole kann das zu druckende Bauteil stets so ausgerichtet werden, dass Stützstrukturen vermieden werden können. Um die Bewegung der Druckplatte dabei nicht durch die Kinematik eines seriellen Industrieroboters zu limitieren, soll der am IGMR entwickelte und gebaute Paragrip mit seinem modularen objektintegrativen Handhabungsdesign zum Einsatz kommen. Die Abbildung zeigt ein Rendering des geplanten Umbaus des Paragrips für den Einsatz in der Multidirektionalen Additiven Fertigung mittels Lichtbogenschweißen.
Ansprechpartner:
Neuer kollaborativer Industrieroboterarm: UR10e
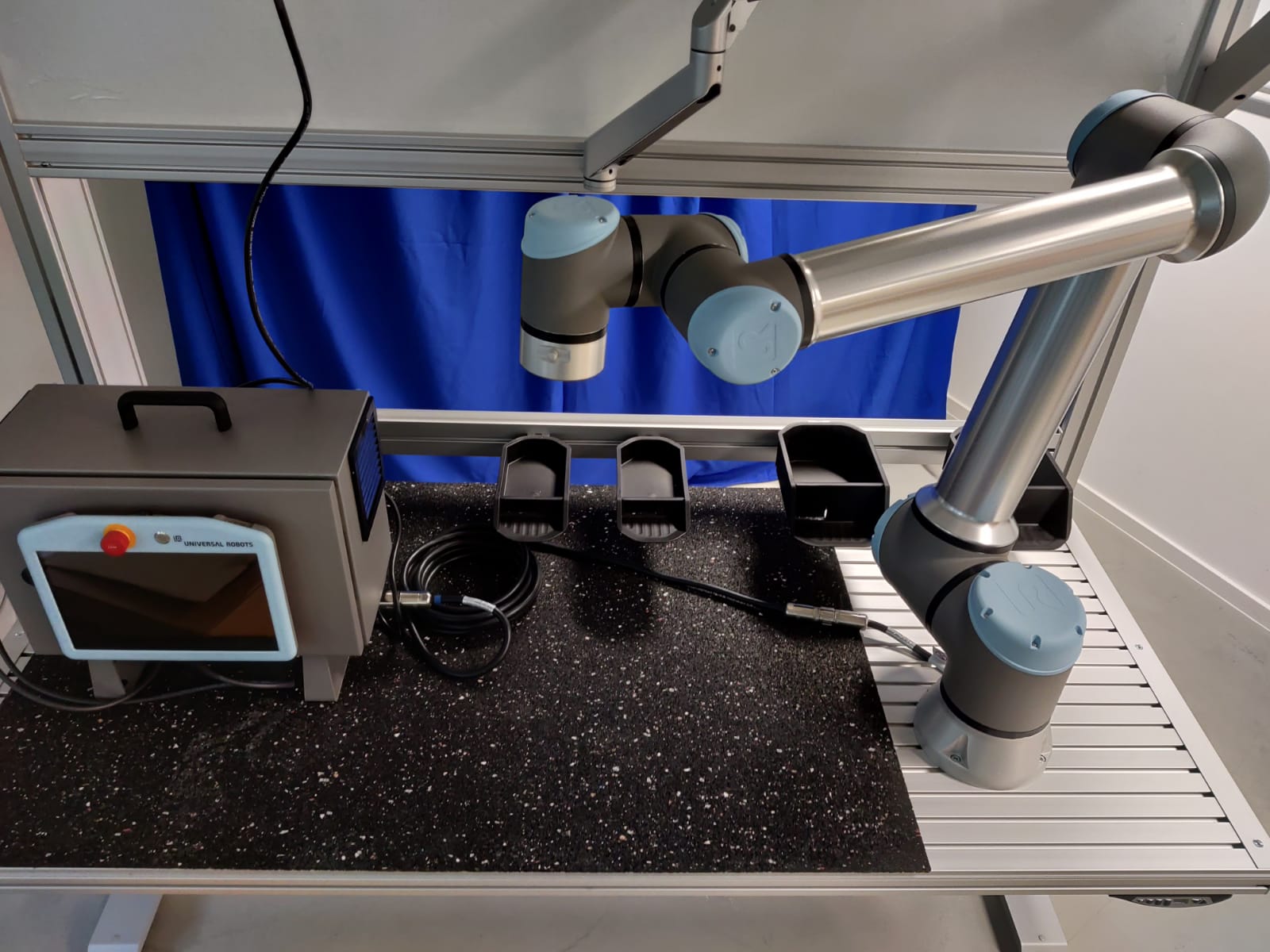
Das IGMR-Kobot-Team vergrößert sich mit der Inbetriebnahme des Universal Robot UR10e.
Das Kobot-Team im Kleinversuchfeld des IGMRs hat durch den Universal Robot UR10e Zuwachs bekommen. Mit einer Reichweite von 1.300 mm und einer Traglast von 10 kg ist er der leistungsstärkste und größte kollaborative Roboter im Team und eignet sich deswegen besonders gut für Pick-and-Place-, Palettierungs-, Verpackungs- und Montageaufgaben. Zudem ist er, einfach zu programmieren und schnell in neuen Anwendungen zu integrieren. Der Roboter wird im Rahmen des Next Generation Projekts eingesetzt und soll hier in Kombination mit einem Bin-Picking-System für das Aufnehmen und Handhaben von ungeordneten Blechbauteilen aus einem Bunker programmiert werden.
Internetseiten:
Ansprechparter:
Automatisierte Aufgabenplanung in industriellen Szenarien

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Die automatisierte Aufgabenplanung ist eine übergeordnete Steuerungsstrategie, die in Szenarien mit kollaborierenden Menschen und Robotern verwendet werden kann. Diese Strategie ist dazu nötig, um die Akteure und die auszuführenden Aufgaben zu bestimmen, welche zum Erreichen des Ziels ausgeführt werden müssen.
Für das folgende Industrieszenario werden mit dieser Strategie die Aufgaben berechnet, welche durch den Menschen und das FTS, also den beiden Agenten, ausgeführt werden müssen. Am Ende der Ausführung allen geplanten Aktionen sollen alle Gegenstände mit der Handbohrmaschine oder dem Nietwerkzeug bearbeitet wurden.
Die geplanten Aktionen werden zur Ausführung über ein spezielles Framework gesendet, welches in das Robot Operating System (ROS) integriert ist. Jede geplante Aktion wird über so genannte „Action Interfaces“ auf ihre konkrete Ausführung in der Simulation abgebildet. Im industriellen Szenario sind lediglich endliche Zustandsmaschinen als Action Interfaces integriert, wobei deren Zustände Akteur-spezifische Aufrufe an verschiedene ROS-Module darstellen.
Ansprechpartner:
MOOC Machine Dynamics with Matlab

Learn the basics of machine dynamics and use them to model, simulate and analyze the behavior of a car with the powerful tools provided by The MathWorks.
Are you keen to design a vehicle suspension using MATLAB? In this course, you will start at the very beginning of dynamic modelling, simulation and analysis of a technical system using different The MathWorks products. You will be introduced to a broad range of methodologies used in the field of machine dynamics. You will learn how to model a vehicle using the fundamentals of mechanics. You will get a deep understanding of the equations of motion and how to solve them using the powerful tools of The MathWorks. Eventually, you will gain the ability to analyze and interpret the computational results in order to optimize your design.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Contact:


