

Kategorie: ‘Simulationen’
Optimalsteuerung zur Schwingungsunterdrückung

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
In Pick and Place Aufgaben, welche in der industriellen Praxis häufig mit Delta Robotern umgesetzt werden, werden kurze Zykluszeiten angestrebt. Diese führen zu hohen Beschleunigungen des Roboters und somit zu hohen Trägheitskräften, welche das Gestell zu Schwingungen anregen. Die Gestellschwingungen reduzieren die Performance und die Positioniergenauigkeit des Roboters und führen zu Materialermüdung. Um die Gestellschwingungen zu reduzieren, haben wir einen Optimalsteuerungsansatz entwickelt, der schwingungsreduzierende Trajektorien berechnet. Zur Schwingungsreduktion wird hierbei die freie Gestellschwingung nach Trajektorienende unterdrückt. Der gewählte Ansatz optimiert die Trajektorie ganzheitlich, d.h. es werden sowohl der geometrische Pfad als auch das Bewegungsgesetz entlang des Pfades optimiert. Die Optimierung nutzt ein Mehrkörpersimulationsmodell, welches mithilfe einer experimentellen Systemidentifikation aufgebaut wurde. Anwendungs- und roboterspezifische Randbedingungen können bei der Berechnung schwingungsreduzierende Trajektorien berücksichtigt werden.
Ansprechpartner:
Nils Brückmann
Christian Mirz
Preprint des zugehörigen Papers finden Sie hier.
Weitere Informationen zum Delta Roboter finden Sie hier.
Simulation einer teilautomatisierten, robotischen Fliesenlegehilfe

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Im Rahmen des ErgoFli Projekts wird in Zusammenarbeit mit Projektpartnern ein innovatives System entwickelt, das Fliesenverlegern helfen soll, ihre Arbeit ergonomischer und effizienter zu gestalten.
In dem Video könnt ihr sehen, wie das System in der Simulationsumgebung Gazebo arbeitet. Der Roboter entnimmt automatisch Fliesen aus einem Magazin und passt sie perfekt zu den bereits verlegten Fliesen an. Mit automatischen Verfahren können mehrere Fliesen hintereinander verlegt werden, um den Arbeitsprozess zu optimieren.
Unser Ziel ist es, ein Hilfsmittel zu schaffen, das nicht nur die Arbeitsbelastung für Fliesenleger reduziert, sondern auch ihre Arbeitsumgebung verbessert. Wir sind begeistert von den Fortschritten und freuen uns darauf, euch bald weitere Einblicke zu geben!
Erfahre hier noch mehr über das Projekt.
Ansprechpartner:
Mark Witte
Jan Wiartalla
Querschnittsgruppe: Application Dynamics

Das Team hinter Application Dynamics setzt sich aus allen Forschungsbereichen des IGMR zusammen. Auf diese Weise können die Fähigkeiten auf dem Gebiet der Schwingungsanalyse und Maschinendynamik optimal mit den Kompetenzen und langjährigen Erfahrungen rund um die Themen der Getriebetechnik und Robotik verein werden. Dieser Zusammenschluss Instituts interner Forschungsschwerpunkte, ermöglicht Problemlösungen in denen sowohl fachliche Kompetenzen der Dynamik als auch anwendungsspezifisches Fachwissen gefragt sind. Angewendet wird dieser Wissensquerschnitt beispielsweise in Form einer anforderungsbasierten Untersuchung und Ausnutzung der dynamischen Effekte eines Systems. Der Fokus liegt auf Anwendungen aus dem Bereich der Robotik und Getriebetechnik, erfasst darüber hinaus jedoch jegliche Arten mechanischer Bewegungseinrichtungen. Der aktuelle Forschungshorizont erstreckt sich von kinematischer Redundanz über high Speed Trajektorien bis hin zur Nutzung neuronaler Netze, mit welchen eine Erweiterung des Arbeitsraumes durch innovative Objektmanipulation erreicht wird.
Ansprechpartner: Johannes Bolk
Vorstellung des Projekts „ErgoFli“ auf dem KT-Kolloquium 2022

Das Ziel des ZIM-geförderten Projekts „ErgoFli“ ist es, eine intelligente, halbautomatisierte Fliesenlegehilfe zu entwickeln. Diese soll nicht ergonomische Haltungen von Fliesen legenden Personen durch ihre intuitive Benutzerschnittstelle, das automatisierte Handhaben von Fliesen und Fliesenkleber sowie eine intelligente Steuerung um bis zu 66% reduzieren. Der ErgoFli kann mit einem motorisierten Antrieb verfahren werden und nutzt eine lineare Verlegekinematik zum Verlegen von Fliesen ohne direkten Wandkontakt im Buttering-Floating-Verfahren. Es können Fliesen in den beiden Formaten 30×60 cm bzw. 60×60 cm im Kreuzverband verlegt werden. Der Roboter besitzt Speicher für Fliesen und Fliesenkleber, sodass er mindestens 30 Minuten ohne Nachfüllen verwendet werden kann und schafft eine Verlegeleistung von 12 m2 in der Stunde bei gleichzeitiger Gewährleistung der entsprechenden normgerechten Ebenheitstoleranzen.
Mithilfe eines digitalen Zwillings konnte bereits ein früher Prototyp in verschiedenen Szenarien getestet werden. Während die Konstruktion des Prototyps in gängiger CAD-Software erfolgt, wird das jeweils aktuelle Modell parallel in die Simulationsumgebung Gazebo eingebunden. Dies ermöglicht das kontinuierliche Integrieren und Testen von Softwarepaketen der Steuerung in anwendungsnahen Szenarien. Über eine Closed-Loop Simulation können beispielsweise reale Testdaten an den digitalen Zwilling übertragen werden. So werden die drei Laser-Profilsensoren des Fliesengreifers sowieso Sauggreifer auf einem prototypischen Greifer befestigt und an einem UR10 Roboterarm montiert. Die Messwerte der Sensoren können dann trotz unterschiedlicher Kinematiken auf den digitalen Zwilling in der Simulation übertragen werden. Auf diese Weise kann die Positionsregelung des Greifers über die Vermessung der Fugenbreiten bereits frühzeitig im Gesamtsystem integriert werden.
Ansprechpartner:
Jan Wiartalla
Marius Gürtler
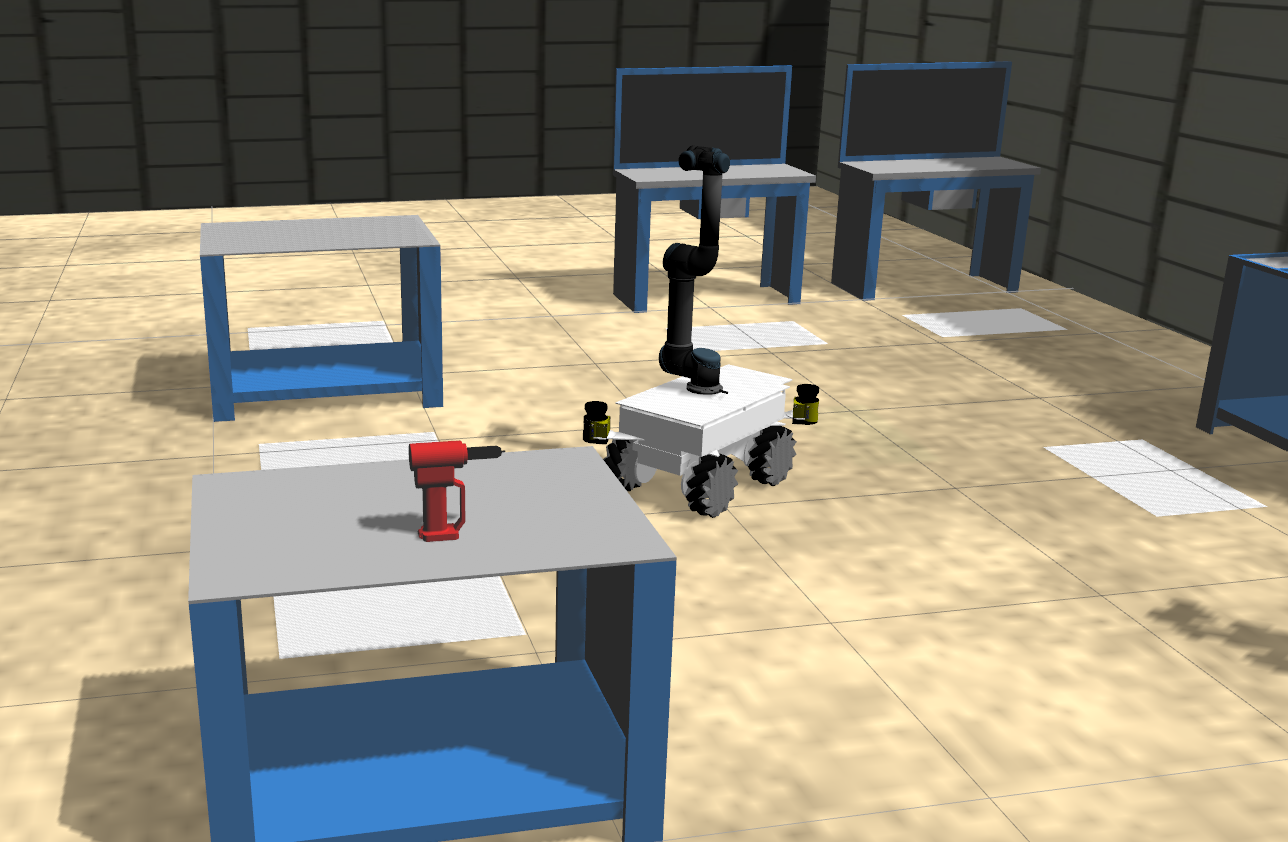
Integrierte AI-Aufgabenplanung und Schraubenerkennung in einem Fertigungsszenario

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Das Video findet ihr auch auf unserem Youtube-Kanal.
Ansprechpartner:
Daniel Gossen
Entwicklung neuer Handgelenke für den Paragrip
In einem gemeinsamen Forschungsprojekt des IGMR mit dem ISF der RWTH Aachen wird an der Multidirektionalen Additiven Fertigung (MDAM) metallischer Bauteile geforscht. Um den mehrarmigen Paragrip-Roboter für diesen Einsatzzweck zu optimieren hat der Student Raphael Hoffmann im Rahmen seiner Bachelorarbeit ein innovatives Konzept neuer Handgelenke erarbeitet. Dieses ermöglicht es, den Schweißstrom ohne ein sonst zusätzlich benötigtes Massekabel direkt über die Handgelenke zu leiten. Darüber hinaus ermöglichen sie ein formschlüssiges Greifen des Druckbettes mit Selbstzentrierung zum Minimieren von Positionierungsungenauigkeiten.
Weitere Informationen zu dem Projekt könnt ihr hier nachlesen.
Das Video dazu findet ihr auf unserem YouTube Kanal: https://youtu.be/VdT1rjYG4D0
Ansprechpartner:
HEUTE IGMR-Seminar: Ingenieure der Zukunft!
Ingenieure der Zukunft!
Erfahre, wie Simulationen, digitale Prototypen und Virtual Reality den Arbeitsalltag revolutionieren!
- Konzepte zum modellbasierten Entwickeln mechatronischer Produkte
- Einsatz von digitalen Prototypen, Simulationen & Virtual Reality (VR)
- Weber Maschinenbau als moderner Workplace
Zu Beginn des neuen Jahres startet das IGMR Seminar mit einem Vortrag von Dennis Baum von der Weber Maschinenbau GmbH. Auch dieser Veranstaltung wird weiterhin virtuell durchgeführt:
Dienstag, 12. Dezember 2020 16:30 Uhr in Zoom
Die Veranstaltungen im Wintersemester 2020/2021 werden in Zusammenarbeit mit dem VDI-GPP-Arbeitskreis des Bezirksvereins Aachen durchgeführt.
Zoom Meeting Informationen:
https://rwth.zoom.us/j/98454895570?pwd=NkpiSWkyaTJtdWlralJrSUtnMDdDZz09
Meeting-ID: 984 5489 5570
Kenncode: 186393
Die Datenschutzhinweise zur Nutzung von Zoom und eine Handreichung für Teilnehmer (Studierende) können von den Seiten des CLS der RWTH Aachen University heruntergeladen werden.
WAAM-Simulation mit ROS in Gazebo
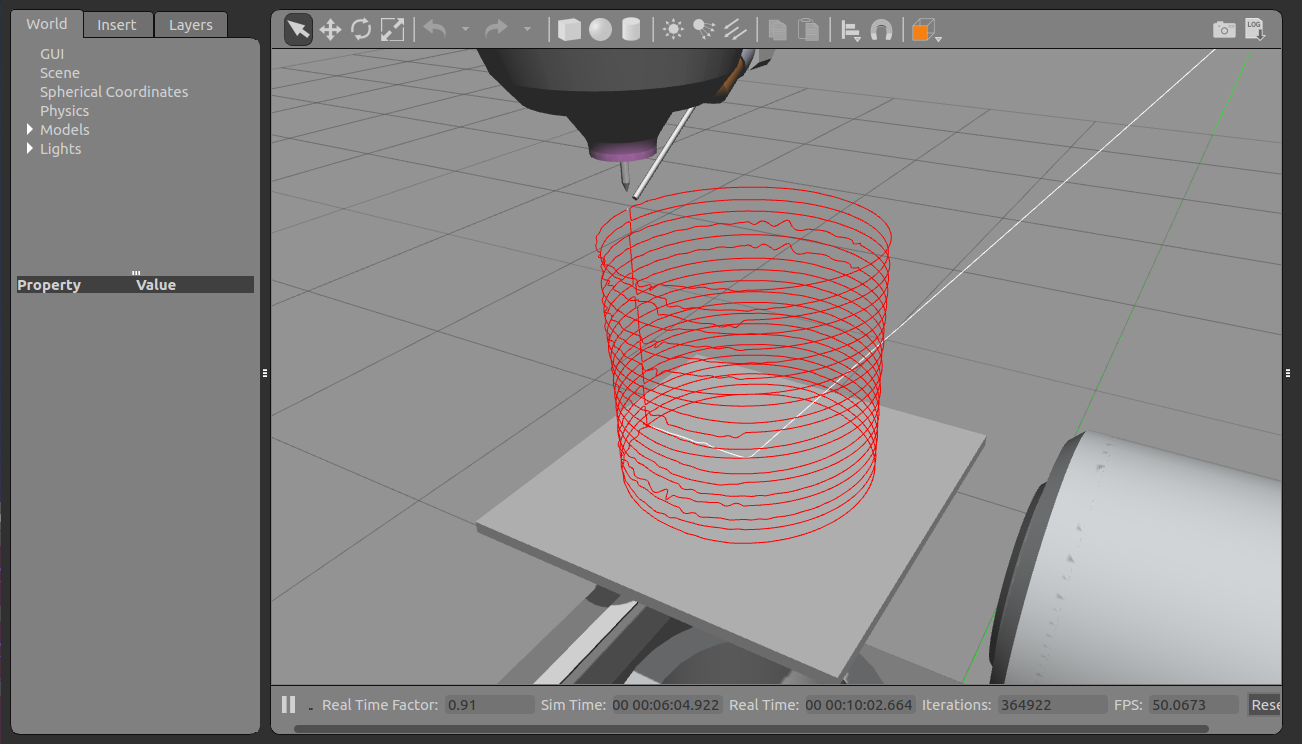
Vincent Brünjes entwarf in seiner Masterarbeit eine Gazebo-Erweiterung, um multidirektionale, additive Wire+Arc-Fertigungsprozesse zu simulieren.
Ansprechpartner:
Realistische Simulationen in Gazebo
Am IGMR entwickeln wir komplexe Simulationsumgebungen. Texturen machen diese in Simulationsprogramm Gazebo optisch realistischer!
Ansprechpartner:


