

Kategorie: ‘Lokalisierung’
Simulation einer teilautomatisierten, robotischen Fliesenlegehilfe

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Im Rahmen des ErgoFli Projekts wird in Zusammenarbeit mit Projektpartnern ein innovatives System entwickelt, das Fliesenverlegern helfen soll, ihre Arbeit ergonomischer und effizienter zu gestalten.
In dem Video könnt ihr sehen, wie das System in der Simulationsumgebung Gazebo arbeitet. Der Roboter entnimmt automatisch Fliesen aus einem Magazin und passt sie perfekt zu den bereits verlegten Fliesen an. Mit automatischen Verfahren können mehrere Fliesen hintereinander verlegt werden, um den Arbeitsprozess zu optimieren.
Unser Ziel ist es, ein Hilfsmittel zu schaffen, das nicht nur die Arbeitsbelastung für Fliesenleger reduziert, sondern auch ihre Arbeitsumgebung verbessert. Wir sind begeistert von den Fortschritten und freuen uns darauf, euch bald weitere Einblicke zu geben!
Erfahre hier noch mehr über das Projekt.
Ansprechpartner:
Mark Witte
Jan Wiartalla
Teilnahme am European Robotics Forum (ERF) Hackathon 2022

Im Rahmen des European Robotics Forum (ERF) Hackathons 2022 haben sechs Studierende des IGMR ihr Talent in Prototyping und dem Umgang mit Robotern unter Beweis gestellt. Die Hackathon Aufgabe wurde unter anderem von dem Unternehmen Lely gestellt. Deren mobile Roboter „Juno“ sind autonom fahrende zylindrische Plattformen, deren Hauptaufgabe darin besteht in Agrarbetrieben die Einzäunung von Kühen abzufahren, um so das in den Raum geschobene Futtermittel wieder erreichbar zu machen. Ähnlich lautete die Aufgabenstellung im Hackathon: Zwei Juno Roboter sollen in zwei miteinander verbundenen Räumen mit einer definierten Distanz die Wände abfahren. Weitere Einschränkungen und Herausforderungen ermöglichten zusätzliche Punkte zu verdienen. Das Team konnte sich erfolgreich beim Hackathon in Rotterdam beweisen. Nach einem knappen Kopf-an-Kopf-Rennen ging der erste Platz an die TU Delft. Bei der Siegerehrung durften wir für unsere „ständige Unterstützung anderer Teams in Konstruktion und 3D Druck“ als kooperativstes Team groß gelobt werden. Dieses „beispielhafte Verhalten“ sei gerne gesehen und wir freuen uns nächstes Jahr wieder dabei zu sein.
Besonderes Lob gilt unseren Studenten Sebastian Polzin, Frederik van Kerkom, Jonas Braun, Oleksander Kutovyi, Ali Berger und Yannik Freischlad für das eingesetzte Engagement. Wir gratulieren der TU Delft zum verdienten Sieg und freuen uns über die vielen neuen Freunde und wertvolle Kontakte, die wir gewinnen konnten. Wir danken der Institutsleitung für die Möglichkeit zur Teilnahme und freuen uns auf nächstes Jahr.
Ansprechpartner:
Integrierte AI-Aufgabenplanung und Schraubenerkennung in einem Fertigungsszenario

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Das Video findet ihr auch auf unserem Youtube-Kanal.
Ansprechpartner:
Daniel Gossen
Entwicklung neuer Handgelenke für den Paragrip
In einem gemeinsamen Forschungsprojekt des IGMR mit dem ISF der RWTH Aachen wird an der Multidirektionalen Additiven Fertigung (MDAM) metallischer Bauteile geforscht. Um den mehrarmigen Paragrip-Roboter für diesen Einsatzzweck zu optimieren hat der Student Raphael Hoffmann im Rahmen seiner Bachelorarbeit ein innovatives Konzept neuer Handgelenke erarbeitet. Dieses ermöglicht es, den Schweißstrom ohne ein sonst zusätzlich benötigtes Massekabel direkt über die Handgelenke zu leiten. Darüber hinaus ermöglichen sie ein formschlüssiges Greifen des Druckbettes mit Selbstzentrierung zum Minimieren von Positionierungsungenauigkeiten.
Weitere Informationen zu dem Projekt könnt ihr hier nachlesen.
Das Video dazu findet ihr auf unserem YouTube Kanal: https://youtu.be/VdT1rjYG4D0
Ansprechpartner:
Fahrerlose Transportsysteme
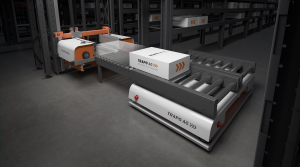
Bildquelle: TRAPO AG
Fahrerlose Transportsysteme werden immer häufiger in modernen Anlagen und Lager integriert. Trapo AG hat ein führendes Produkt in der Branche, der Trapo Transport Shuttle (TTS), mit der Unterstützung vom IGMR der RWTH Aachen entwickelt. Die Mitarbeiter des IGMR waren bei der Entwicklung und Integration von den Lokalisierung- und Navigationsalgorithmen, bei der Erstellung der Zustandsmaschinen, durch welchen das Verhalten vom TTS bestimmt ist, und bei den intensiven Testphasen involviert. Alle Methoden und Algorithmen wurden in der ROS Umgebung integriert und konfiguriert. Das ganze System wurde schon erfolgreich beim Kunde im Betrieb genommen.
Ansprechpartner:
Stefan Bezrucav
Markus Schmitz
SLAM Validierung mittels iGPS

Zur Validierung von Lokalisierungs- und Kartierungsalgorithmen (SLAM) für mobile Roboter verwenden wir am IGMR das indoor Global Positioning System von Nikon.
Die gleichzeitige Erfassung der eigenen Position und die Kartierung der Umgebung ist ein klassisches Problem in der mobilen Robotik und nach wie vor ein aktuelles Forschungsthema. Insbesondere die Steigerung von Genauigkeit, Allgemeingültigkeit und Robustheit sind Ziele aktueller Entwicklungen. Aus diesem Grund validieren wir unsere Algorithmen in der mobilen Robotik mit dem Nikon iGPS, um auch für große Szenarien eine Ground Trouth mit einer Frequenz von 40 Hz und einer Genauigkeit von 0,2 mm nutzen zu können. Auf diese Weise können kritische Ungenauigkeiten und Loop Closure Methoden deutlich besser quantifiziert und analysiert werden.
Projektseite:
Bots2Rec
Ansprechpartner:
Simon Schläger


