

In Köln haben die Teilnehmenden zum ersten Mal die Roboter kennengelernt. Die Begeisterung und Spannung bei allen Beteiligten war groß.
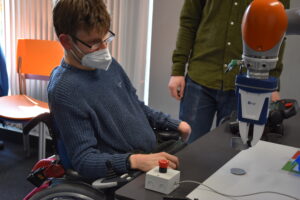
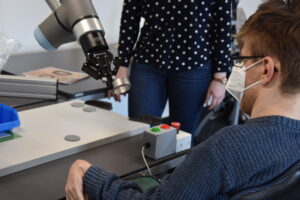
Im Rahmen der Robotervorstellung hatte jeder Teilnehmende eine Stunde Zeit, mit den Roboter in beispielhaften Anwendungen zu arbeiten. Dazu haben wir den KUKA LBR iiwa 7 und den Universal Robot UR10e mit einer unserer Musteranwendungen programmiert, bei denen die Teilnehmenden gute und schlechte Bauteile visuell prüfen mussten. Der Roboter dient dabei als Assistenzmedium und hat den Teilnehmenden die Bauteile angereicht und abgelegt oder gehalten und gedreht, je nachdem ob die Teilnehmenden das Bauteil selber handhaben konnten oder nicht.
In einer dritten Anwendung gab es die Möglichkeit den Kinova Jaco² per Joystick zu steuern und Bauteile zu greifen. Obwohl die Joysticksteuerung großen Anklang fand, muss die Bewegungskoordination noch geübt werden. Mit diesem Ergebnis ist klar, dass für die beiden anderen Roboter auch eine Joystick-Steuerung wünschenswert ist. Angedacht ist darum, den Teilnehmenden die Positionierung und Drehung des Bauteils mit dem Joystick zu ermöglichen, um den visuellen Prüfprozess zu verbessern. Bisher dreht der Roboter das Bauteil in festgelegten Intervallen, bevor eine Eingabe über Taster erfolgen kann.
Ein Video mit weiteren Eindrücken der Robotervorstellung gibt es demnächst hier im Robotik Blog zu sehen.
Weitere Informationen und Bilder zur Robotervorstellung sind auf der Projektwebsite zu finden.
Internetseite des Projektes NextGeneration
Ansprechpartnerinnen und Ansprechpartner


