

Kategorie: ‘Virtuelle Prototypen’
Haptic Feedback System RePlaLink
The videos are also available on our Youtube channel:
Humans interact with hand-actuated products on a daily basis. Examples are car doors, manual presses, furniture doors, machine housings, fitness equipment, or reconfigurable types of furniture. The RePlaLink can be used for the simulation and haptic representation of such mechanisms based on virtual prototypes. This makes it possible to improve the development process of such systems and reduce the use of physical prototypes.
The RePlaLink consists of a servo-driven kinematic structure with a handle as haptic interface. Due to its structure, it is particularly well suited to simulate planar mechanisms. The system measures, among others, the user forces, takes them into account in a real-time simulation of the virtual mechanism and displays its reaction. This allows users to directly feel the mechanism’s haptic properties while operating the system. Users can change them interactively by modifying the mechanism’s parameters and get direct haptic feedback. This enables fast, inexpensive, and frequent validation and evaluation of haptic properties, even at early development stages. The videos introduce the structure of the RePlaLink and show the haptic simulation and synthesis of an exemplary hand-actuated mechanism.
You can find more information about the project here.
Contact person:
Jan-Lukas Archut
Mahshid Pour Ebrahimabadi
MobiLamas

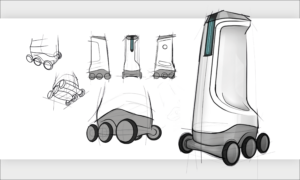
MobiLamas is a concept for free-float charging in the city of the future. In our vision, individual transport will shift from cars to public transport, complemented by so-called last-mile vehicles (e.g., electric bikes or scooters). In such environments, ecological and economical solutions are needed to enable safe and smart charging for a variety of devices. MobiLamas are intelligent mobile robots that interact with last-mile vehicles and charging stations, and safely navigate urban spaces in the presence of pedestrians.
Contact:
Haptic feedback system RePlaLink
At IGMR, the haptic feedback system RePlaLink (Reconfigurable Planar Linkage) is being developed. With this system, hand-actuated mechanisms can be haptically simulated and interactively synthesized. Furthermore, users can interactively synthesize these mechanisms. This should allow mechanisms with optimal haptic properties to be developed.
People frequently interact with hand-actuated mechanisms in everyday life, e.g., in car doors, furniture doors, reconfigurable furniture, or fitness equipment. Their haptic properties largely determine the perceived quality of these mechanisms. The RePlaLink (Reconfigurable Planar Linkage) aims to support the design and development of these mechanisms by applying haptic feedback systems based on virtual prototypes. The haptic simulation and synthesis method allows users to directly feel mechanisms’ kinematic and kinetostatic properties while operating the system. In addition, users can interactively modify these properties and receive direct haptic feedback. In the first video, the design of the RePlaLink, consisting of a planar five-link with an additional serial link for the handle, is shown.
https://youtu.be/pemrysX4Cr8
The second video shows haptic simulation and synthesis using a kitchen cabinet door as an example.
https://youtu.be/0AqONOv1R5E
Project page:
https://www.igmr.rwth-aachen.de/index.php/de/gt/gt-replalink
Contact:
Mahshid Pour Ebrahimabadi M.Sc.


