At the MSE, load-bearing components are created using generative design and optimized for stress through FEM analyses. Building on this stress data, the VCI develops print path-oriented strategies that are specifically aligned with the principal stress directions. This reduces anisotropic effects in additively manufactured components, improves material utilization, and significantly increases component strength.
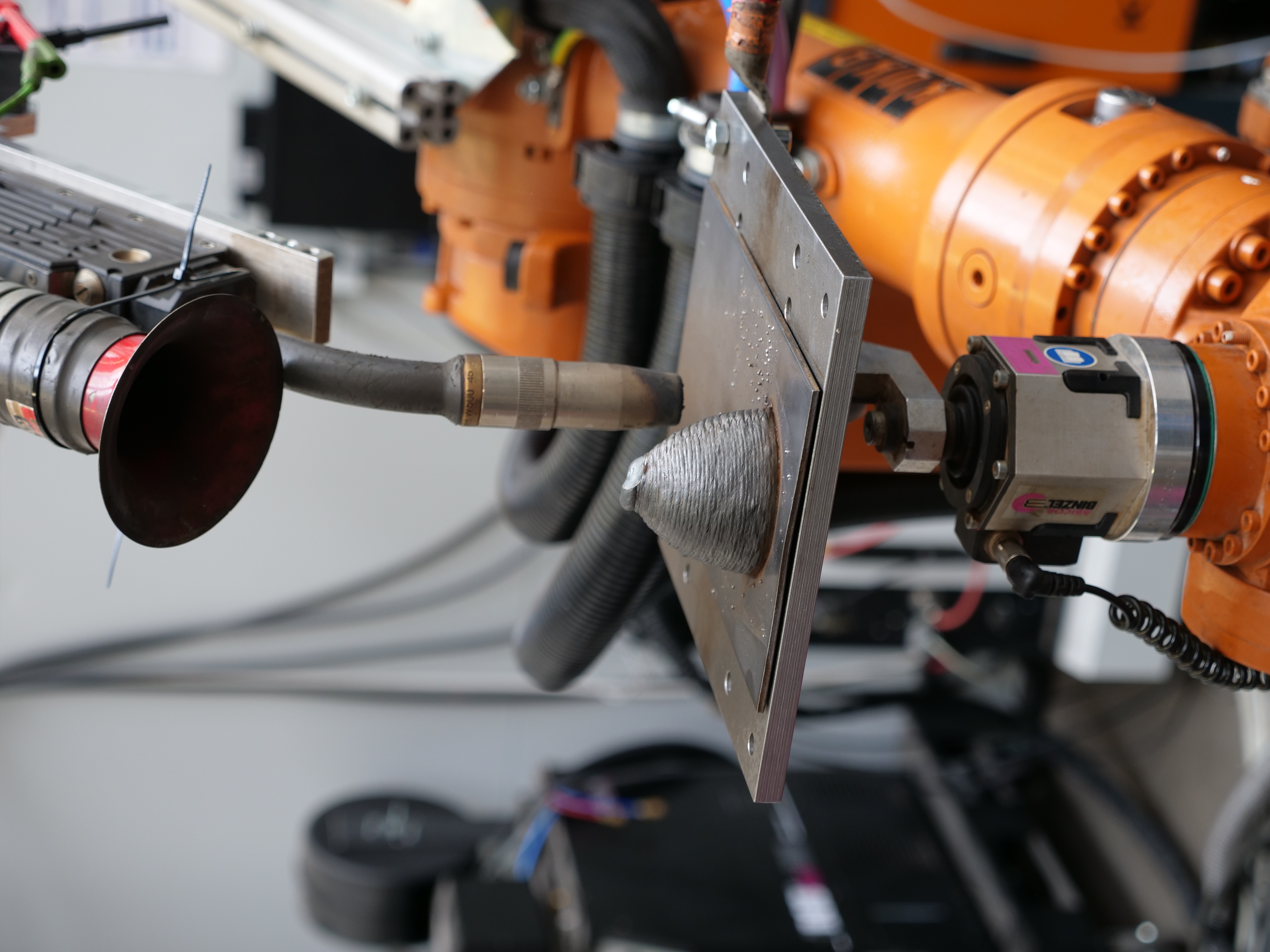
At the IGMR, we put these innovative print paths into practice: Using a robot-assisted setup—consisting of a moving print bed and a fixed extruder—the paths are first adjusted and then converted into precise robot trajectories. The manufactured components are finally subjected to mechanical testing to validate the underlying hypotheses.