

Archive for April, 2022
Transformation of workplaces by human-robot collaboration (HRC) at Ford

Since April 2021, employees with disabilities have been working successfully with a collaborative robot at the production line of Ford engine plant in cologne. The robot takes over the unergonomic pressing of the VCT solenoids into the engine cover and the employee installs the screws. During this process, humans and robots work simultaneously in the same workspace. The key findings and results of the project are summarized in the strategy paper.
Further information on the project can be found here.
Contact:
Development of new wrists for the Paragrip
In a joint research project of the IGMR together with the ISF of the RWTH Aachen University, the Multidirectional Additive Manufacturing (MDAM) of metallic components is being researched. In order to optimize the multi-armed. Paragrip robot for this application, student Raphael Hoffmann has developed an innovative concept of a new robotic wrist in his bachelor thesis. The concept enables the welding current to be conducted directly through the wristsm without the need for an additional ground cable attached to the print bed. Moreover, the wrists enable form fitting gripping of the print bed with self-centering to minimize positioning inaccuracies.
You can find the video on our YouTube channel: https://youtu.be/VdT1rjYG4D0
Contact:
Jan Wiartalla
MobiLamas

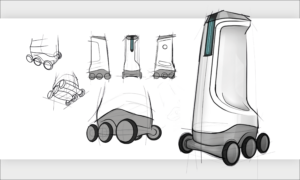
MobiLamas is a concept for free-float charging in the city of the future. In our vision, individual transport will shift from cars to public transport, complemented by so-called last-mile vehicles (e.g., electric bikes or scooters). In such environments, ecological and economical solutions are needed to enable safe and smart charging for a variety of devices. MobiLamas are intelligent mobile robots that interact with last-mile vehicles and charging stations, and safely navigate urban spaces in the presence of pedestrians.
Contact:


