

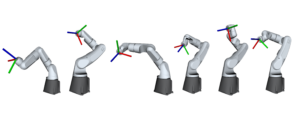
We have further developed the concept of the in-house robot IGOR (https://blog.rwth-aachen.de/robotik/igor-konzept-eines-hauseigenen-6-achs-roboters/). Now, different configurations of the robot with a different number of degrees of freedom are available. Each configuration also has a different type of wrist and arm. All models are controllable via Robot Operating System ROS.
Contact person:
Markus Schmitz
Markus Schmitz


