

Kategorie: ‘Design of Experiments’
New research topic at IGMR: Pick & Toss

Today’s production plants would be unthinkable without robotic pick & place processes. Handling objects are picked by the robot and placed at the target position with the desired target orientation. An innovative possibility to significantly increase the workspace of a robot and to reduce process times is the extension of this process by the targeted throwing of handling objects. Possible areas of application are the sorting of products that are not damaged during the throwing process (e.g. screws or nuts) or whose damage is of secondary relevance (e.g. sorting out defective products, separating materials in recycling plants).
Our goal is to describe the robotic pick & toss process using a combination of classical analytical and machine learning models to make the innovative process industrially viable.
Contacts:
Nils Brückmann
Johannes Bolk
Integrated AI task planning and screw recognition in a production scenario

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
The video is also available on our YouTube channel.
Contact:
Daniel Gossen
Kunststoff Cyclo-Getriebe
Am IGMR entwickeln wir performante Kunststoff-Getriebe für den Einsatz in Robotern.

In Zusammenarbeit mit der BAM GmbH arbeiten wir im Rahmen eines ZIM Projekts an der Realisierung und Optimierung eines Cyclo-Getriebes aus Kunststoff. Herausforderungen sind die schlechten Fertigungsgenauigkeiten in der additiven Fertigung und das daraus resultierenden Umkehrspiels und die Drehmomentschwankungen im Getriebe.
Mit einem am IGMR entwickelten Prüfstand sind wir in der Lage die Performance zu analysieren und kontinuierlich zu verbessern. Die Getriebe werden in Zusammenarbeit mit der TU München in einem modularen Robotersystem eingesetzt.
Ansprechpartner:
Entwicklung, Konstruktion und Anwendung von Prüfständen am IGMR


Das IGMR betreibt seit vielen Jahren eine eigene mechanische Werkstatt zur Fertigung von Prototypen im Bereich von Forschungs- und Entwicklungsprojekten sowie der Lehre.
Zu den Stärken des Teams zählen, die jahrelange Erfahrung der qualifizierten Mitarbeiter im Bereich der Prototypenfertigung und Montage von Baugruppen sowie die anschließende finale Installation und Inbetriebnahme der Versuchseinrichtungen und Prüfstände.
Zudem findet am IGMR innerhalb des Teams eine stetige Kommunikation zwischen der Entwicklung, Konstruktion und Produktion sowie der Integration von Elektro-, Mess- und steuerungstechnischen Komponenten statt. In der Herstellung von robotischen Systemen, Handhabungsgeräten und Bewegungsgeinrichtungen ist eine hochgenaue Fertigung, iterative Arbeitsweise und fachübergreifende Kommunikation von großer Bedeutung. Die Komponenten müssen präzise aufeinander abgestimmt werden und unterliegen einer ständigen Überprüfung innerhalb des Produktentwicklungsprozesses. Neben den herkömmlichen Zerspanungsverfahren wird in unserer Werkstatt das Verfahren des 3D-Drucks (additive Fertigung) angewendet, um je nach Anwendungsfall und Ausführbarkeit ein erstes Funktionsmuster schnell und kostengünstig zu erstellen. Die Anwendung von CAD-Systemen im Bereich der Fertigung ist selbstverständlich.
Fertigungsverfahren:
• Drehen
• Fräsen
• Bohren
• Sägen
• Sandstrahlen
• Schweißen (Elektrode)
• 3D-Druck
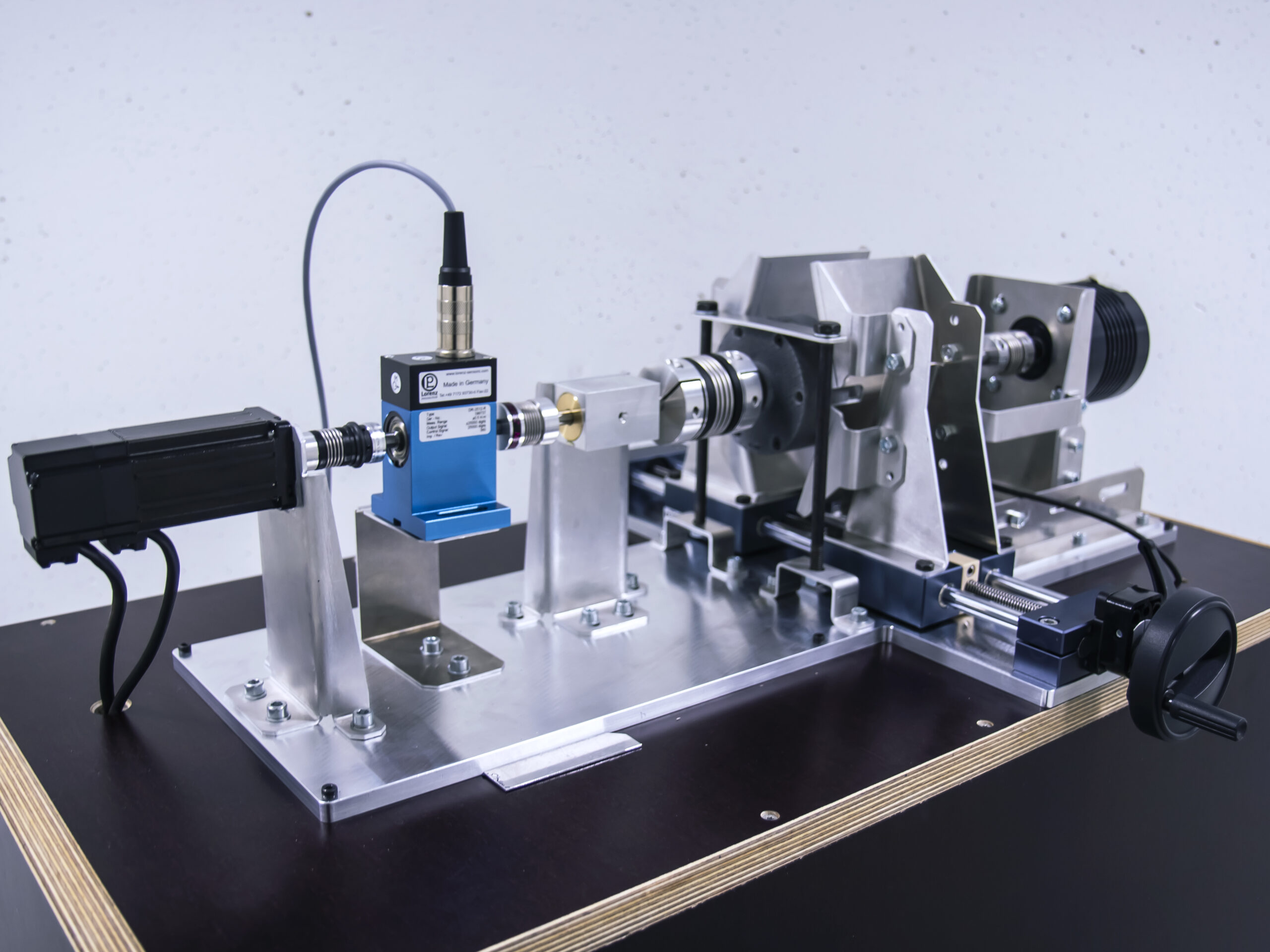
Ein Beispiel der vielfältigen Fertigungsmöglichkeiten der mechanischen Werkstatt in Kombination mit den messtechnischen Kompetenzen des IGMR zeigt die Entwicklung, Konstruktion und Anwendung eines Prüfstands zur Ermittlung der ertragbaren Lastzyklen filigraner, hochgenauer stoffschlüssiger Gelenke.
Im Rahmen des DFG-Projektes „Grundlegende Untersuchung zu stoffschlüssigen
Gelenken mit Einsatz in hochgenauen parallelkinematischen Mikromanipulatoren“ wurde ein Prüfstand zur Ermittlung der ertragbaren Lastzyklen filigraner Kerbgelenke gebaut und Lebensdaueruntersuchung durchgeführt.
Hierbei wurde die Lebensdauer stoffschlüssiger Gelenke untersucht, da diese zwar in der Feinwerktechnik weit verbreitet , aber kaum experimentellen Untersuchungen zur Lebensdauer dieser Gelenke vorhanden sind.
Der Aufbau des Prüfstandes wird in folgendem Video präsentiert:
https://youtu.be/j4ZF_1qZSUk
Besondere Herausforderung bei der Prüfstandsentwicklung waren das reproduzierbare Einsetzen der filigranen Strukturen / stoffschlüssigen Gelenke, die eindeutige Detektion der Gelenkermüdung und die automatisierte Erfassung der Messergebnisse sowie die Berücksichtigung der hohen Lastzyklen aufgrund des Dauerbetriebs.
Links:
Technikum, Labore und mechanische Werkstatt am IGMR
Veröffentlichung zum Prüfstand
Ansprechpartner:


