

Schlagwort: ‘MobileRobots’
Execution of the planned actions in CoppeliaSim
June 19th, 2020 | by Ruland, Stefan Wolfgang
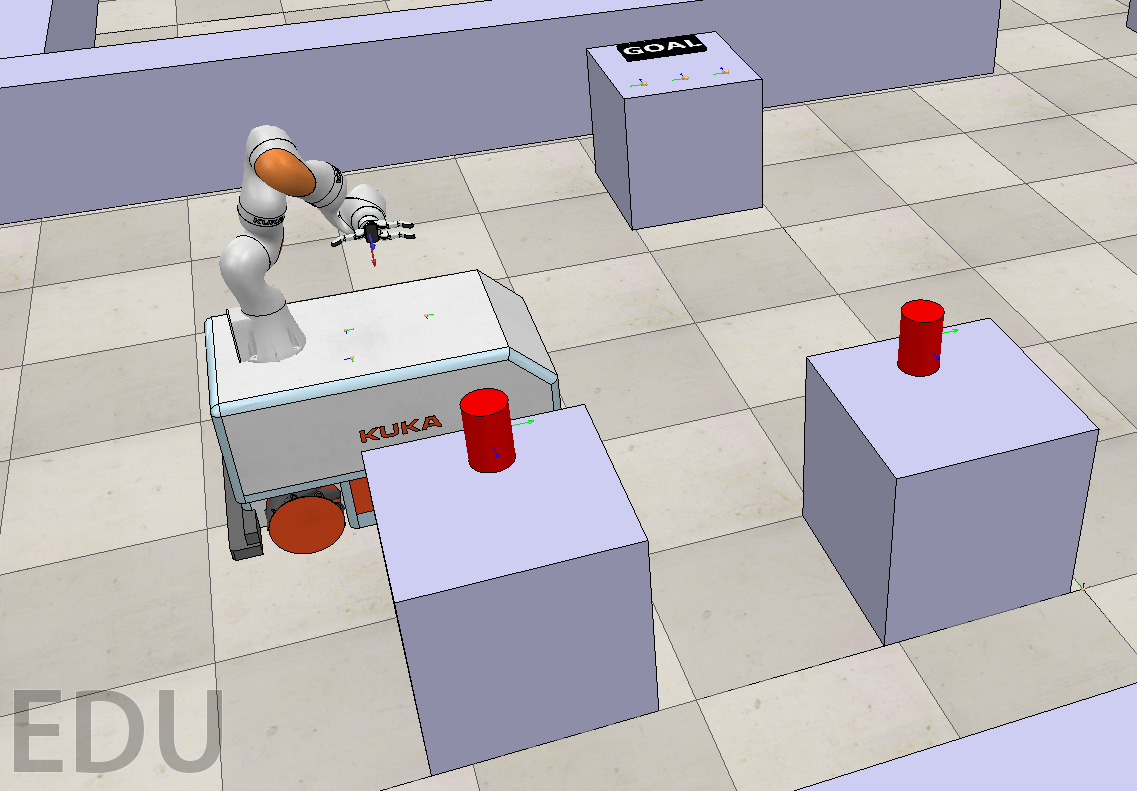
Implementation of ROS Action Interfaces to connect the AI task planning framework ROSPlan with the simulation software CoppeliaSim
Contact person:
Task planning in industrial scenario
June 19th, 2020 | by Ruland, Stefan Wolfgang
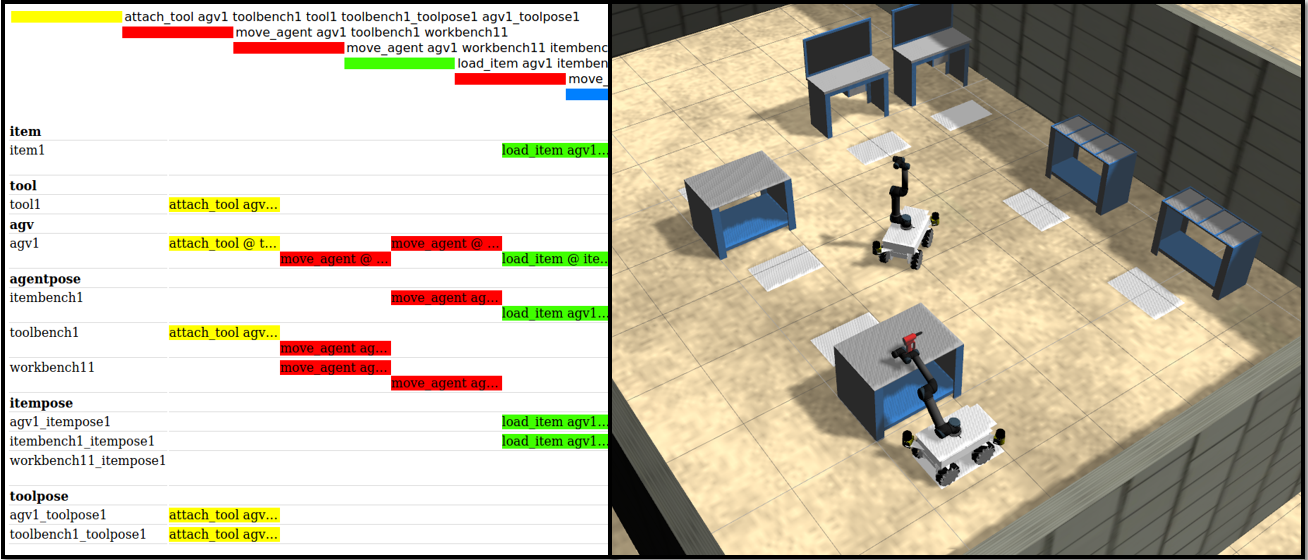
PDDL modeling, ROSPlan and Gazebo simulations are used to improve automatic scheduling algorithms for scenarios with collaborating actors.
Contact person:


