

Schlagwort: ‘IGMR’
IIDEA beim daaap-Jahrestreffen 2025 in Koblenz

Im März durften wir als Aussteller und Netzwerkmitglied von daaap am diesjährigen Jahrestreffen bei den Rhein-Mosel-Werkstätten in Koblenz teilnehmen.
Ein besonderes Highlight: Die Veranstaltung wurde unter anderem von Frau Schall, Ministerin für Arbeit, Soziales, Transformation und Digitalisierung in Rheinland-Pfalz, eröffnet. Sie nahm sich Zeit, das IIDEA-Projekt kennenzulernen und konnte unseren Musterarbeitsplatz sogar selbst ausprobieren.
Wir freuen uns sehr über das Interesse der teilnehmenden Werkstätten an unserem Projekt. Der direkte Austausch, wertvolle Gespräche und neue Kontakte zeigen: Die Vision von inklusiver Digitalisierung wird geteilt und weitergetragen.
Ansprechpartner:
Mathias Hüsing
Projektstart: AuBa@C – Automation of Battery Disassembly

Wir haben unser neues Projekt „AuBa@C – Automation of Battery Disassembly using Advanced Hardware and Software for Battery Recycling“ zusammen mit cylib gestartet. Hier am IGMR forschen wir an der automatisierten Demontage mit Robotern. In dem Projekt mit cylib können wir unser Fachwissen aus Projekten wie Bots2ReC, SHEREC oder di.monta auf die Demontage von EV-Batterien übertragen.
Wir freuen uns auf die Zusammenarbeit mit cylib (Dr. Stefan-Octavian Bezrucav (Leiter der Vorverarbeitung und Robotik-Experte) und Sara Ognjanovic (Projektleiterin für die Automatisierung der Batterieentladung und -demontage)).
Dieses Projekt wird gefördert durch die Förderinitiative „KUER.NRW | Grüne Gründungen Nordrhein-Westfalen“ im Rahmen des Europäischen Fonds für regionale Entwicklung (EFRE/JTF NRW 2021-2027), koordiniert durch das Ministerium für Umwelt, Naturschutz und Verkehr des Landes Nordrhein-Westfalen und den Projektträger Jülich (PtJ).
Ansprechpartner:
Stefan Groß
Projektinternetseite:
AuBa@C

Begrüßung der neuen Master-Erstsemester

| Das Institut für Getriebetechnik, Maschinendynamik und Robotik heißt alle neuen Mastererstsemester herzlich willkommen!
Am 03.04.2023 hat das Sommersemester begonnen und mit diesem das Masterstudium für viele Erstsemester. Bei einem durch die Fachschaft Maschinenwesen organisierten Grillen zur Begrüßung konnten wir bereits unser Institut vorstellen und mit Studierenden ins Gespräch kommen. Begrüßt wurden die neuen Masterand*innen der Fakultät Maschinenwesen vom IGMR durch Sophie Charlotte Keunecke, Nils Brückmann, Vincent Brünjes und Thomas Knobloch. Die Studierenden konnten auf diese Weise erste Kontakte zu den Instituten knüpfen und auch verschiedene Projekte kennenlernen. Ein besonderes Highlight war die Vorstellung des Robot Companion durch Maximilian Hilger! Wir danken der Fachschaft Maschinenwesen für dieses großartige Angebot und euer immenses Engagement. Allen neuen Erstsemestern wünsche wir alles Gute für Ihr Studium und eine unvergessliche Zeit an der RWTH und der Fakultät Maschinenwesen. Ansprechpartner:
|
Erfolgreiche Workshops mit der Technischen Universität Liberec

Nach längerer Corona-Pause konnte das IGMR mit großer Freude eine Delegation der Technische Universität Liberec (TUL) am Institut begrüßen.
Vier verschiedenen Instituten der Technische Universität Liberec haben uns ihre faszinierenden Projekte und interessanten Präsentationen vorgestellt, ehe wir in kleineren Workshops gemeinsame Forschungsinteressen erarbeitet haben.
Die Technische Universität Liberec und das IGMR blicken schon auf viele Jahre gemeinsamen Austauschs und enger Zusammenarbeit zurück; die Einschränkungen durch die Pandemie haben das nicht schwächen, aber doch stark einschränken können.
Umso mehr freuen wir uns, zukünftig unsere Kooperation mit neuen, gemeinsamen Forschungsinteressen weiter untermauern zu können.
Ansprechpartner: Sophie Charlotte Keunecke
Entwicklung neuer Handgelenke für den Paragrip
In einem gemeinsamen Forschungsprojekt des IGMR mit dem ISF der RWTH Aachen wird an der Multidirektionalen Additiven Fertigung (MDAM) metallischer Bauteile geforscht. Um den mehrarmigen Paragrip-Roboter für diesen Einsatzzweck zu optimieren hat der Student Raphael Hoffmann im Rahmen seiner Bachelorarbeit ein innovatives Konzept neuer Handgelenke erarbeitet. Dieses ermöglicht es, den Schweißstrom ohne ein sonst zusätzlich benötigtes Massekabel direkt über die Handgelenke zu leiten. Darüber hinaus ermöglichen sie ein formschlüssiges Greifen des Druckbettes mit Selbstzentrierung zum Minimieren von Positionierungsungenauigkeiten.
Weitere Informationen zu dem Projekt könnt ihr hier nachlesen.
Das Video dazu findet ihr auf unserem YouTube Kanal: https://youtu.be/VdT1rjYG4D0
Ansprechpartner:
MobiLamas

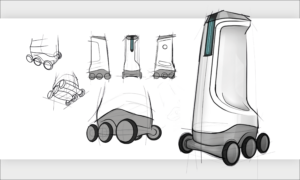
MobiLamas ist ein Konzept für free-float Ladung in der Stadt der Zukunft. In unserer Vision wird sich der Individualverkehr vom Auto auf öffentliche Verkehrsmittel verlagern, die durch sogenannte Last-Mile Fahrzeuge (z. B. Elektrofahrräder oder -roller) ergänzt werden. In solchen Umgebungen sind ökologische und ökonomische Lösungen erforderlich, um sicheres und intelligentes Laden für eine Vielzahl von Geräten zu ermöglichen. MobiLamas sind intelligente mobile Roboter, die mit Last-Mile Fahrzeugen und Ladestationen interagieren und sich in Anwesenheit von Fußgängern sicher im städtischen Raum bewegen.
Ansprechpartner:
IGOR – unser hauseigener Roboter
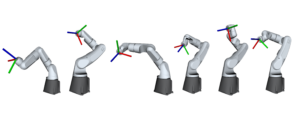
Wir haben das Konzept des hauseigenen Roboters IGOR (https://blog.rwth-aachen.de/robotik/igor-konzept-eines-hauseigenen-6-achs-roboters/) weiter entwickelt. Nun stehen verschiedene Konfigurationen des Roboters mit einer unterschiedlichen Anzahl von Freiheitsgraden zur Verfügung. Jede Konfiguration hat auch eine unterschiedliche Art von Handgelenk und Arm. Alle Modelle sind über Robot Operating System ROS steuerbar.
Ansprechpartner:
Wie Baustellenroboter eine Wand bearbeiten
Der eigens entwickelte Roboter verfügt über 7 Freiheitsgrade, die ausschließlich über Drehgelenke realisiert werden. Durch die Redundanz kann der Roboter auch in verwinkelten Situationen wie Fluren oder Nischen seine volle Leistung entfalten. Im Video ist auf der linken Seite eine vertikale Trajektorie zu sehen, in der der Roboter vom Boden bis in eine Höhe von 2,50m eine Wand bearbeitet. Das Video auf der rechten Seite zeigt das horizontale Abzeilen einer Wand unmittelbar vor dem Roboter.
Weitere Informationen zu diesem Projekt findet ihr auf der IGMR Website.
Ansprechpartner:
M.Sc. Robotic Systems Engineering

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Weitere Informationen zum Masterstudiengang können der Institutsseite entnommen werden.
Ansprechpartner:
KI Aufgabenplanung erklärt
Die Künstliche Intelligenz Aufgabenplanung erklärt anhand eines Industrie-Szenarios.
https://youtu.be/qNDgJc1XUPM
Die Automatisierte Aufgabenplanung soll den Robotereinsatz in flexiblen Umgebungen unterstützen.
Die traditionelle Roboterprogrammierung als Teilbereich der Arbeitsvorbereitung stellt individuelle Produktionen mit kleinen Stückzahlen vor große Herausforderungen. Die Automatisierte Aufgabenplanung verspricht als Lösungsansatz die Probleme zu beheben.
Im Video wird neben der Einführung und Einordnung der Automatisierten Aufgabenplanung dargestellt, welche Schritte zur Implementierung notwendig sind und welche Vorteile durch ihren Einsatz entstehen.
Das Konzept wurde im Rahmen der Forschung am IGMR anhand einer Simulation validiert, die in den Beispielen des Videos verwendet wird.
Ansprechpartner:


