

Schlagwort: ‘IGMR’
Neuer kettengetriebener Mobilroboter am IGMR

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Im Zuge der Forschung für die Feuerwehr und Outdoor-Anwendungen wurde am IGMR ein neuer Mobilroboter angeschafft. Der Jaguar V2 ist regenbeständig und kann dank seines Kettenantriebs und seiner Flipper-Mechanismen über Hindernisse und Treppen steigen. Einen ersten Test seht ihr im Video.
Ansprechpartner:
Autonome Schraubenerkennung in SHAREWORK

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Im Projekt SHAREWORK haben wir eine Methode zur Erkennung von Schrauben bei der Montage von Drehtischen entwickelt. Das Verfahren ist einfach adaptierbar und gliedert sich in zwei Teile. Zunächst werden Testdaten erzeugt und der Klassifikator angelernt. Danach kann das System im Realeinsatz verwendet werden. Wie das genau aussieht, seht ihr im Video.
Ansprechpartner:
Übungsbeobachtung bei der Feuerwehr Krefeld


Für den Bereich Feuerwehr- und Einsatzrobotik entstehen am IGMR Methoden zur Prädiktion
des Verhaltens von Einsatzkräften im Innenangriff. Für eine erste Parameterstudie wurde eine Übungsbeobachtung
bei der Realbrandausbildung der Feuerwehr Krefeld durchgeführt. In diesem Video wird der Ablauf eines Einsatzes
zur Personenbergung und Brandbekämpfung dokumentiert.
Wir bedanken uns bei der Feuerwehr Krefeld für die Mithilfe bei dem Vorhaben.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Ansprechpartner:
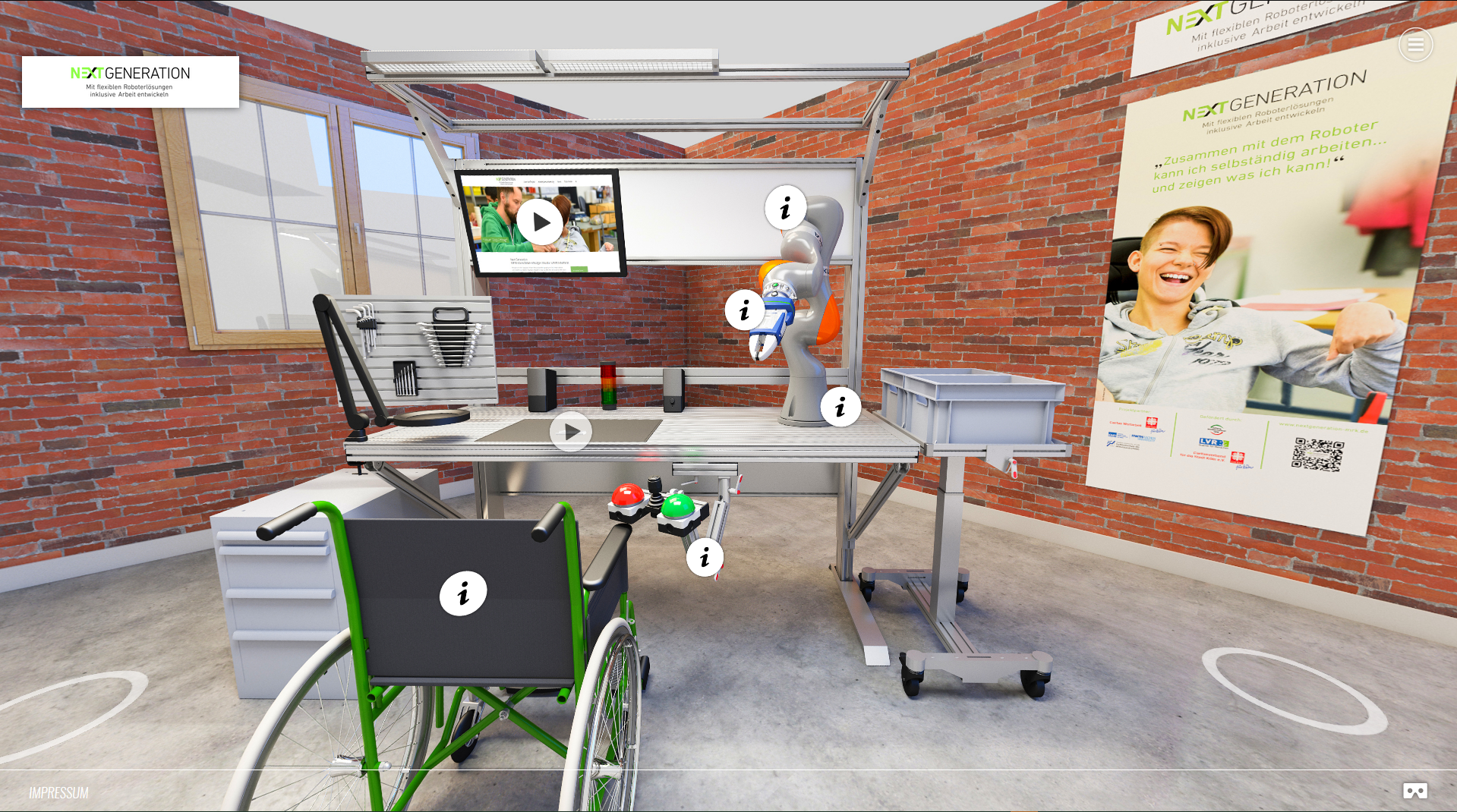
Next Generation: virtueller Messestand zum inklusiven Arbeitsplatz
digitales IGMR Sommerfest & Ehemaligentreffen am 29.07.2021 ab 15:00 Uhr

Demonstration des lokalen Sicherheitssystems von SHAREWORK
Im EU-Projekt SHAREWORK haben wir kürzlich ein lokales Sicherheitssystem für Mensch-Roboter-Kollaboration fertiggestellt und in betrieb genommen. Wie dieses sich in der Praxis schlägt, zeigt unser Demo-Video.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Ansprechpartner:
IGOR – Konzept eines hauseigenen 6-Achs-Roboters
Am IGMR haben wir einen hauseigenen Roboter entworfen, der uns in Zukunft bei virtuellen Darstellungen und Simulationen für Anträge und Forschungsprojekte unterstützen soll.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Ansprechpartner:
Erste FDM Druckversuche im Rahmen der Multidirektionalen Additiven Fertigung
Die ersten Hürden des prototypischen Aufbaus sind geschafft. Nun kann die entwickelte Prozessvorbereitung getestet werden.
https://youtu.be/WlblPv46NG4
Im Rahmen des DFG geförderten Projekts soll die Multidirektionale Additive Fertigung für das Lichtbogenschweißen erforscht werden. Die Prozessvorbereitung soll nun zunächst im FDM Verfahren validiert werden.
Ansprechpartner:
Kurzfilm zum Projekt Next Generation
Menschen mit einer Schwermehrfachbehinderung in auf dem ersten Arbeitsmarkt integrieren. Ist das überhaupt möglich?
Wie dies mit kollaborativen Robotern möglich wird, zeigt ein Video zum Projekt NextGeneration auf dem Youtube-Kanal der Caritas Köln.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Internetseiten:
Ansprechparter:
Aktive Kollisionsvermeidung in der Mensch-Roboter-Kollaboration
Vor dem Hintergrund der Mensch-Roboter-Kollaboration untersucht das IGMR der RWTH Aachen innovative Ansätze zur sicheren Gestaltung teilautomatisierter Montage- und Produktionsprozesse.
Marktübliche Cobots sind in der Regel mit einer Geschwindigkeits- und Abstandsüberwachung beziehungsweise einer Leistungs- und Kraftbegrenzung nach ISO/TS 15066 ausgestattet. Entsprechende Roboter reagieren demnach im Gefährdungs- oder Kollisionsfall mit einer Reduktion der Prozessgeschwindigkeiten beziehungsweise mit einem Betriebshalt, wodurch industrielle Prozesse im Zweifel nachteilig beeinflusst werden.
Der hier vorgestellte Ansatz zeigt deshalb, wie sich Kollisionen zwischen Mensch und Roboter aktiv vermeiden lassen. Das Verfahren nutzt die kinematische Redundanz des KUKA LBR iiwa, um sensorisch erfassten Hindernissen durch die innere Rekonfiguration der Roboterkinematik auszuweichen. Die Trajektorie des Endeffektors wird dabei nicht verändert, sodass der vorgegebene Prozessablauf erhalten bleibt. In diesem Zusammenhang lassen sich alternative Sicherheitskonzepte entwickeln, die eine kollisionsfreie Automatisierung im Rahmen der Mensch-Roboter-Kollaboration ermöglichen.
Aktive Kollisionsvermeidung mit dem KUKA LBR iiwa – Referenzbewegung ohne Hindernisumfahrung:

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Aktive Kollisionsvermeidung mit dem KUKA LBR iiwa – optimierter Bewegungsverlauf mit Hindernisumfahrung durch kinematische Rekonfiguration:

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Ansprechpartner:


