

Schlagwort: ‘IGMR’
New chain-driven mobile robot at IGMR

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
The Jaguar V2 is rainproof and can climb over obstacles and stairs thanks to its chain drive and flipper mechanisms. A first test can be seen in the video.
Contact:
Autonomous screw detection in SHAREWORK

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
In the SHAREWORK project, we have developed a method for detecting screws during the assembly of rotary tables. The method is easy to adapt and consists of two parts. First, test data is generated and the classifier is trained. The system can then be used in real applications. You can see exactly what this looks like in the video.
Contact:
Exercise observation at the Krefeld Fire Brigade


The IGMR is developing methods for predicting the behaviour of firefighters during indoor of the behaviour of firefighters during an interior attack. For an initial parameter study, an exercise observation was carried out during the real fire training of the Krefeld fire brigade. This video documents the sequence of an operation for rescuing people and fighting fires is documented.
We would like to thank the Krefeld fire brigade for their help with this project.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Ansprechpartner:
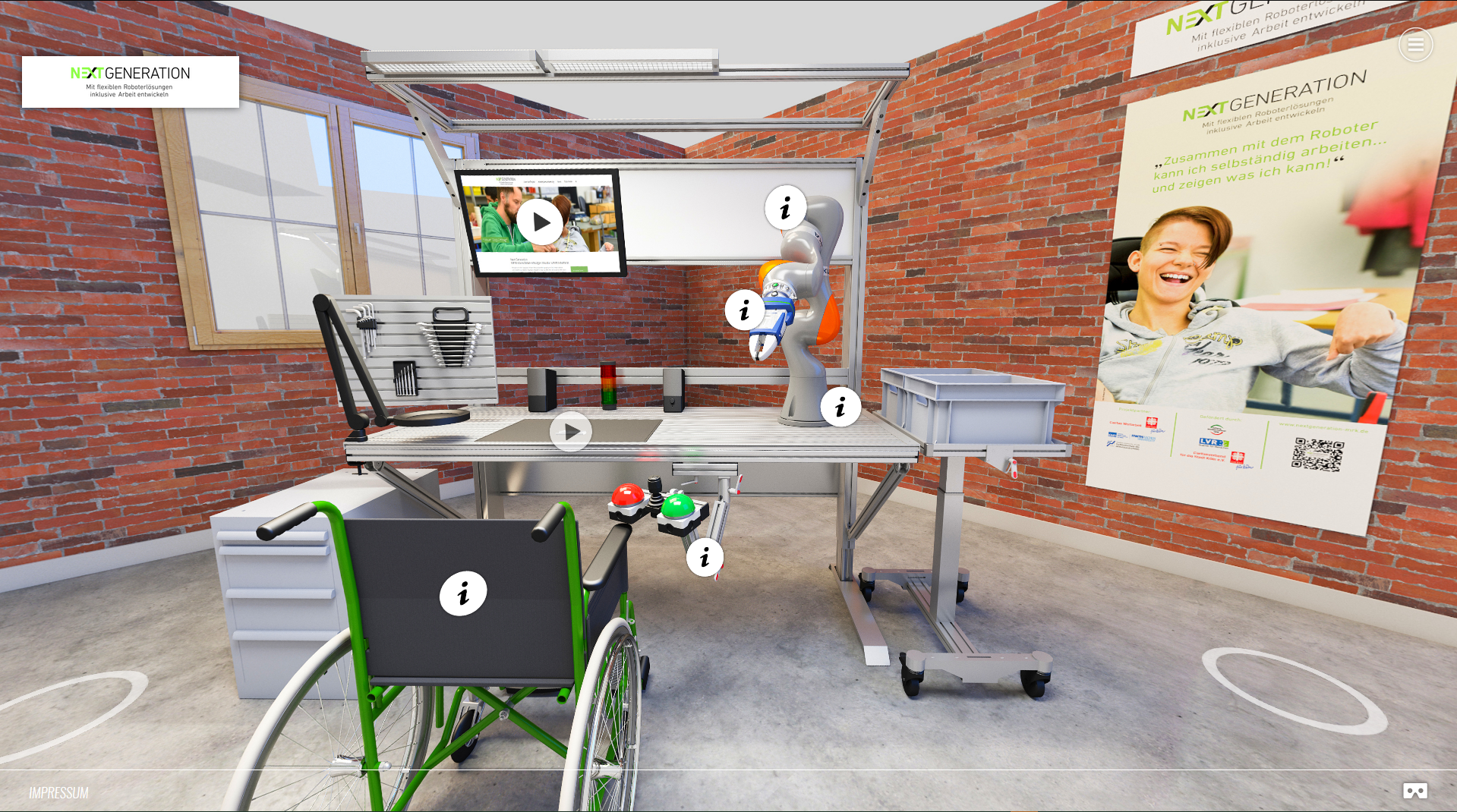
Next Generation: virtueller Messestand zum inklusiven Arbeitsplatz
digitales IGMR Sommerfest & Ehemaligentreffen am 29.07.2021 ab 15:00 Uhr

Demonstration des lokalen Sicherheitssystems von SHAREWORK
Im EU-Projekt SHAREWORK haben wir kürzlich ein lokales Sicherheitssystem für Mensch-Roboter-Kollaboration fertiggestellt und in betrieb genommen. Wie dieses sich in der Praxis schlägt, zeigt unser Demo-Video.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Ansprechpartner:
IGOR – Concept of an In-House 6-Axis Robot
At IGMR, we have designed an In-House Robot to assist us in the Future with Virtual Renderings and Simulations for Applications and Research Projects.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Contact:
Erste FDM Druckversuche im Rahmen der Multidirektionalen Additiven Fertigung
Die ersten Hürden des prototypischen Aufbaus sind geschafft. Nun kann die entwickelte Prozessvorbereitung getestet werden.
https://youtu.be/WlblPv46NG4
Im Rahmen des DFG geförderten Projekts soll die Multidirektionale Additive Fertigung für das Lichtbogenschweißen erforscht werden. Die Prozessvorbereitung soll nun zunächst im FDM Verfahren validiert werden.
Ansprechpartner:
Kurzfilm zum Projekt Next Generation
Menschen mit einer Schwermehrfachbehinderung in auf dem ersten Arbeitsmarkt integrieren. Ist das überhaupt möglich?
Wie dies mit kollaborativen Robotern möglich wird, zeigt ein Video zum Projekt NextGeneration auf dem Youtube-Kanal der Caritas Köln.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Internetseiten:
Ansprechparter:
Active Collision Avoidance in Human-Robot Collaboration
Against the background of human-robot collaboration, the IGMR at RWTH Aachen University is investigating innovative approaches for the safe design of partially automated assembly and production processes.
Commercially available cobots are usually equipped with speed and distance monitoring or power and force limitation according to ISO/TS 15066. In the event of a hazard situation or collision, corresponding robots therefore react by reducing movement speeds or stopping operation completely, which may adversely affect industrial processes.
The presented approach therefore demonstrates how collisions between humans and robots can be actively avoided. The method uses the kinematic redundancy of the KUKA LBR iiwa to avoid obstacles detected by sensors through the internal reconfiguration of the robot kinematics. The trajectory of the end effector is not changed in the process, so that the specified process sequence is maintained. In this context, alternative safety concepts can be developed to enable collision-free automation in the context of human-robot collaboration.
Active collision avoidance with the KUKA LBR iiwa – reference movement without obstacle avoidance:

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Active collision avoidance with the KUKA LBR iiwa – optimized motion course with obstacle avoidance through kinematic reconfiguration:

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Contacts:


