

Archive for May, 2021
MOOC Machine Dynamics with Matlab

Learn the basics of machine dynamics and use them to model, simulate and analyze the behavior of a car with the powerful tools provided by The MathWorks.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Are you keen to design a vehicle suspension using MATLAB? In this course, you will start at the very beginning of dynamic modelling, simulation and analysis of a technical system using different The MathWorks products. You will be introduced to a broad range of methodologies used in the field of machine dynamics. You will learn how to model a vehicle using the fundamentals of mechanics. You will get a deep understanding of the equations of motion and how to solve them using the powerful tools of The MathWorks. Eventually, you will gain the ability to analyze and interpret the computational results in order to optimize your design.
Contact:
PeTRA – Einsatz von Mock-Ups bei den Praxispartnern


Das übergeordnete Ziel von PeTRA (Personen-Transfer Roboter-Assistent) ist die Erschaffung einer robotischen Unterstützungslösung in der Patientenlogistik zur Entlastung des Pflegefachpersonals.
Das IGMR übernimmt im Rahmen des Forschungsvorhabens unter anderem die Entwicklung und Inbetriebnahme einer Kopplungseinheit für das Koppeln des Basisfahrzeugs an Rollstühlen mit dem Ziel, diese mitsamt Patienten sicher transportieren zu können.
In der Woche vom 03. bis 06. Mai 2021 fanden erste Anwendungserprobungen des Robotersystems „PeTRA“ bei den jeweiligen Praxispartnern, Universitätsklinikum Augsburg, Barmherzige Brüder München und Martha-Maria Nürnberg, statt. Für die erste Anwendungserprobung in den Krankenhäusern haben wir in Zusammenarbeit mit KUKA ein Mock-Up des Robotersystems „PeTRA“ erstellt. Unter einem Mock-Up wird ein vereinfachtes Modell, verstanden mit welchem die Funktionen und Maße des späteren Demonstrators getestet werden kann. Das Pflegefachpersonal bekam die Möglichkeit das Mock-Up auszutesten und sich gleichzeitig in die Lage eines Patienten zu versetzen. Für die Erläuterung und technische Fragen standen wir und KUKA bereit. Weiterhin wurde das Feedback des Pflegefachpersonals durch Beobachtungen und Interviews seitens KUKA und IREM festgehalten. Das Robotersystem bzw. das Projekt stoß bei dem Pflegefachpersonal aller Praxispartner auf reges Interesse und es konnten um die 50 Interviews geführt werden. Insgesamt hat sich gezeigt, dass wir mit unserem Robotersystem in die richtige Richtung gehen. Wir konnten über die Erprobungen das Pflegefachpersonal weiterführend in den Konstruktionsprozess des Robotersystems bzw. der Koppeleinheit miteinbeziehen.
Weitere Informationen zum Projekt können den Internetseiten des Projektes und des Bundesministeriums für Bildung und Forschung entnommen werden.
Ansprechpartnerinnen:
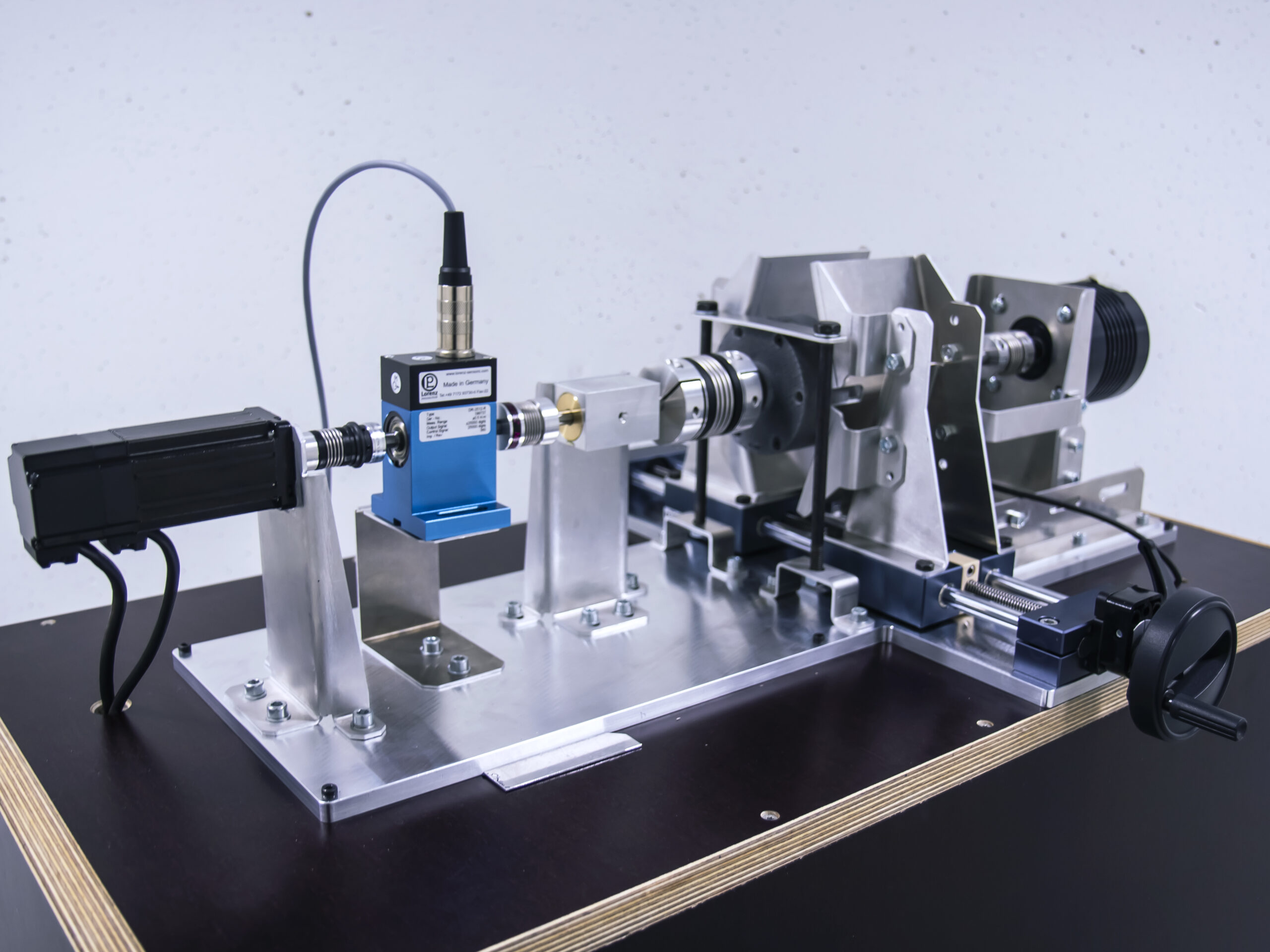
Kunststoff Cyclo-Getriebe
Am IGMR entwickeln wir performante Kunststoff-Getriebe für den Einsatz in Robotern.

In Zusammenarbeit mit der BAM GmbH arbeiten wir im Rahmen eines ZIM Projekts an der Realisierung und Optimierung eines Cyclo-Getriebes aus Kunststoff. Herausforderungen sind die schlechten Fertigungsgenauigkeiten in der additiven Fertigung und das daraus resultierenden Umkehrspiels und die Drehmomentschwankungen im Getriebe.
Mit einem am IGMR entwickelten Prüfstand sind wir in der Lage die Performance zu analysieren und kontinuierlich zu verbessern. Die Getriebe werden in Zusammenarbeit mit der TU München in einem modularen Robotersystem eingesetzt.
Ansprechpartner:
Demonstration des lokalen Sicherheitssystems von SHAREWORK
Im EU-Projekt SHAREWORK haben wir kürzlich ein lokales Sicherheitssystem für Mensch-Roboter-Kollaboration fertiggestellt und in betrieb genommen. Wie dieses sich in der Praxis schlägt, zeigt unser Demo-Video.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Ansprechpartner:
IGMR-Seminar 11.05.2021, 16:00 – 17:00 Uhr: Task Planning, Environment Representation and Reasoning in Agricultural and Industrial Robotics
Wir freuen uns Oscar Lima vom DFKI (Deutsches Forschungszentrum für Künstliche Intelligenz) aus Osnabrück als Vortragender beim nächsten Termin der IGMR Vortragsreihe im Sommersemester 21 zu haben. Der Titel seines Vortrags lautet Task Planning, Environment Representation and Reasoning in Agricultural and Industrial Robotics.
The focus of the talk will be on DFKI Osnabrück projects. Most of our work is related to agricultural robotics, perception, environment representation, reasoning and task planning. We start the talk with the concept of precision farming, how robots can assist there, to then look into route planning, environment representation, and some of its applications in navigation and expert systems. At the end of the talk we will finish with projects that are related with industry 4.0 and one which aims to provide a generic tool for AI planning in Europe. The talk is light and conceptual, I hope to catch your attention with interesting and new ideas!
Zoom Meeting Informationen:
11.05.2021, 16:00 – 17:00 Uhr
https://rwth.zoom.us/j/95798557131?pwd=WDNoUmxLV3h4R2JTWVZWMWNSajhNZz09
Meeting-ID: 957 9855 7131
Kenncode: 917617
Die Datenschutzhinweise zur Nutzung von Zoom und eine Handreichung für Teilnehmer (Studierende) können von den Seiten des CLS der RWTH Aachen University heruntergeladen werden.
Die Veranstaltungen werden in Zusammenarbeit mit dem VDI-GPP-Arbeitskreis des Bezirksvereins Aachen durchgeführt.
IGOR – Concept of an In-House 6-Axis Robot
At IGMR, we have designed an In-House Robot to assist us in the Future with Virtual Renderings and Simulations for Applications and Research Projects.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Contact:


