

Kategorie: ‘WAAM’
Erste FDM Druckversuche im Rahmen der Multidirektionalen Additiven Fertigung
Die ersten Hürden des prototypischen Aufbaus sind geschafft. Nun kann die entwickelte Prozessvorbereitung getestet werden.
https://youtu.be/WlblPv46NG4
Im Rahmen des DFG geförderten Projekts soll die Multidirektionale Additive Fertigung für das Lichtbogenschweißen erforscht werden. Die Prozessvorbereitung soll nun zunächst im FDM Verfahren validiert werden.
Ansprechpartner:
Geplanter Umbau des Paragrip

Um für seine neue Aufgabe in der Additiven Fertigung mittels Lichtbogenschweißen (WAAM) optimal gewappnet zu sein, muss der Paragrip einigen konstruktiven Änderungen unterworfen werden.
In einem gemeinsamen Forschungsprojekt des IGMR mit dem ISF der RWTH Aachen wird an der Multidirektionalen Additiven Fertigung (MDAM) metallischer Bauteile geforscht. Durch das Bewegen des Druckbettes mittels eines Manipulators bei gleichzeitig feststehender Schweißpistole kann das zu druckende Bauteil stets so ausgerichtet werden, dass Stützstrukturen vermieden werden können. Um die Bewegung der Druckplatte dabei nicht durch die Kinematik eines seriellen Industrieroboters zu limitieren, soll der am IGMR entwickelte und gebaute Paragrip mit seinem modularen objektintegrativen Handhabungsdesign zum Einsatz kommen. Die Abbildung zeigt ein Rendering des geplanten Umbaus des Paragrips für den Einsatz in der Multidirektionalen Additiven Fertigung mittels Lichtbogenschweißen.
Ansprechpartner:
Manipulator-specific path planning for multidirectional additive manufacturing
In a joint research project between the IGMR and the ISF of RWTH Aachen University, research is being conducted on the Multidirectional Additive Manufacturing of metallic components.
With the aid of Multidirectional Additive Manufacturing (MDAM), it is possible to build complex components layer by layer and without the need for support structures. By moving the base plate by means of an industrial robot while the welding gun remains fixed, the component to be printed can always be oriented in such a way that support structures can be avoided. The major challenge lies in the consideration of specialized welding processes with external wire feeding and the use of sensors for process monitoring. This results in a dependency of the orientation of the welding gun compared to the currently printed path.
As part of his master’s thesis, Jan Wiartalla developed a path planning algorithm that calculates an executable and, if possible, continuous path within specified, flat part slices that completely fills the cross-sectional area. This is done robot-specific, so that the algorithm always takes the robot currently in use as well as its limitations into account. A standardized interface allows for the robot model to be easily exchanged and the algorithm can thus quickly be adapted to different test environments. The video illustrates the algorithm’s procedure in a simplified way.
https://youtu.be/chuD57ja9JE
Contacts:
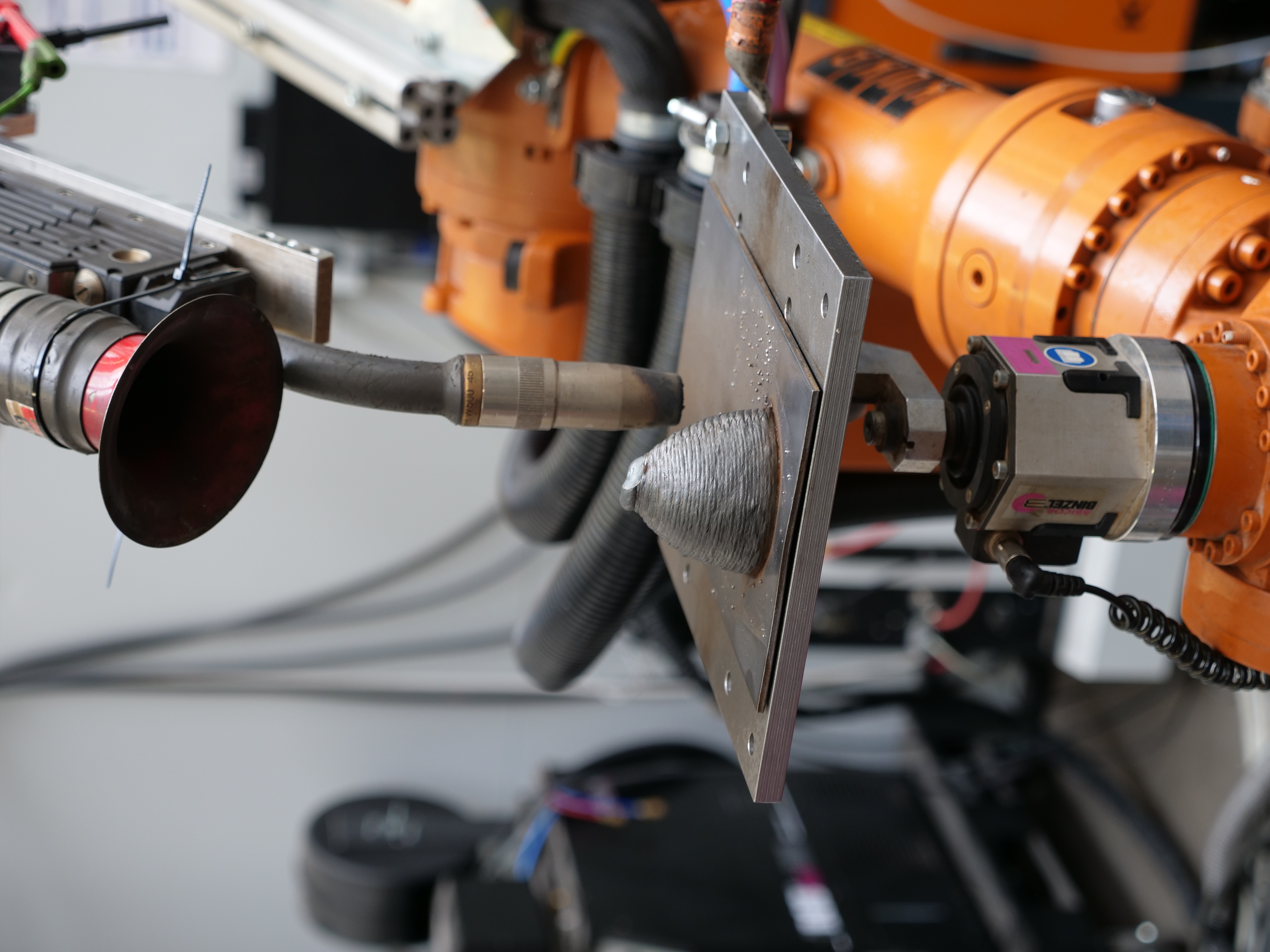
Multidirectional additive manufacturing in arc welding process

In collaboration with the ISF, RWTH Aachen, we at IGMR are researching Multidirectional Additive Manufacturing. In this application for the production of metal components.
Multidirectional Additive Manufacturing enables the production of complex components without support structures, both in the classic FDM process with plastic and with layer-by-layer buildup in the arc welding process. At IGMR, the entire process chain of additive manufacturing is being extended to meet the special challenges of this process from a robotic perspective. This includes the slicing of a virtual component into layers, the subsequent planning of a collision-free structure, the generation of executable robot paths for filling the layers as well as the necessary trajectory planning.
The content embedded at this point takes you to pages provided by the YouTube site operated by Google – YouTube, LLC, 901 Cherry Ave, San Bruno, CA 94066, USA. By calling up the content, YouTube can determine your IP address and the language of the system, as well as various browser-specific details. If you are logged into your YouTube account, you enable YouTube to assign your surfing behavior directly to your personal profile. You can prevent this by logging out of your YouTube account. YouTube uses cookies and tracking tools. The data processing operations as well as the purposes of the processing can be requested and viewed directly at YouTube.
Contact person:
Markus Schmitz
Carlo Weidemann
https://youtu.be/vYejNjBSUp8
Multidirectional Additive Manufacturing
In the new DFG project, components are manufactured with robots using wire arc additive manufacturing. Multidirectionality is to be exploited in the process.
Contact:


