

Geplanter Umbau des Paragrip

Um für seine neue Aufgabe in der Additiven Fertigung mittels Lichtbogenschweißen (WAAM) optimal gewappnet zu sein, muss der Paragrip einigen konstruktiven Änderungen unterworfen werden.
In einem gemeinsamen Forschungsprojekt des IGMR mit dem ISF der RWTH Aachen wird an der Multidirektionalen Additiven Fertigung (MDAM) metallischer Bauteile geforscht. Durch das Bewegen des Druckbettes mittels eines Manipulators bei gleichzeitig feststehender Schweißpistole kann das zu druckende Bauteil stets so ausgerichtet werden, dass Stützstrukturen vermieden werden können. Um die Bewegung der Druckplatte dabei nicht durch die Kinematik eines seriellen Industrieroboters zu limitieren, soll der am IGMR entwickelte und gebaute Paragrip mit seinem modularen objektintegrativen Handhabungsdesign zum Einsatz kommen. Die Abbildung zeigt ein Rendering des geplanten Umbaus des Paragrips für den Einsatz in der Multidirektionalen Additiven Fertigung mittels Lichtbogenschweißen.
Ansprechpartner:
Neuer kollaborativer Industrieroboterarm: UR10e
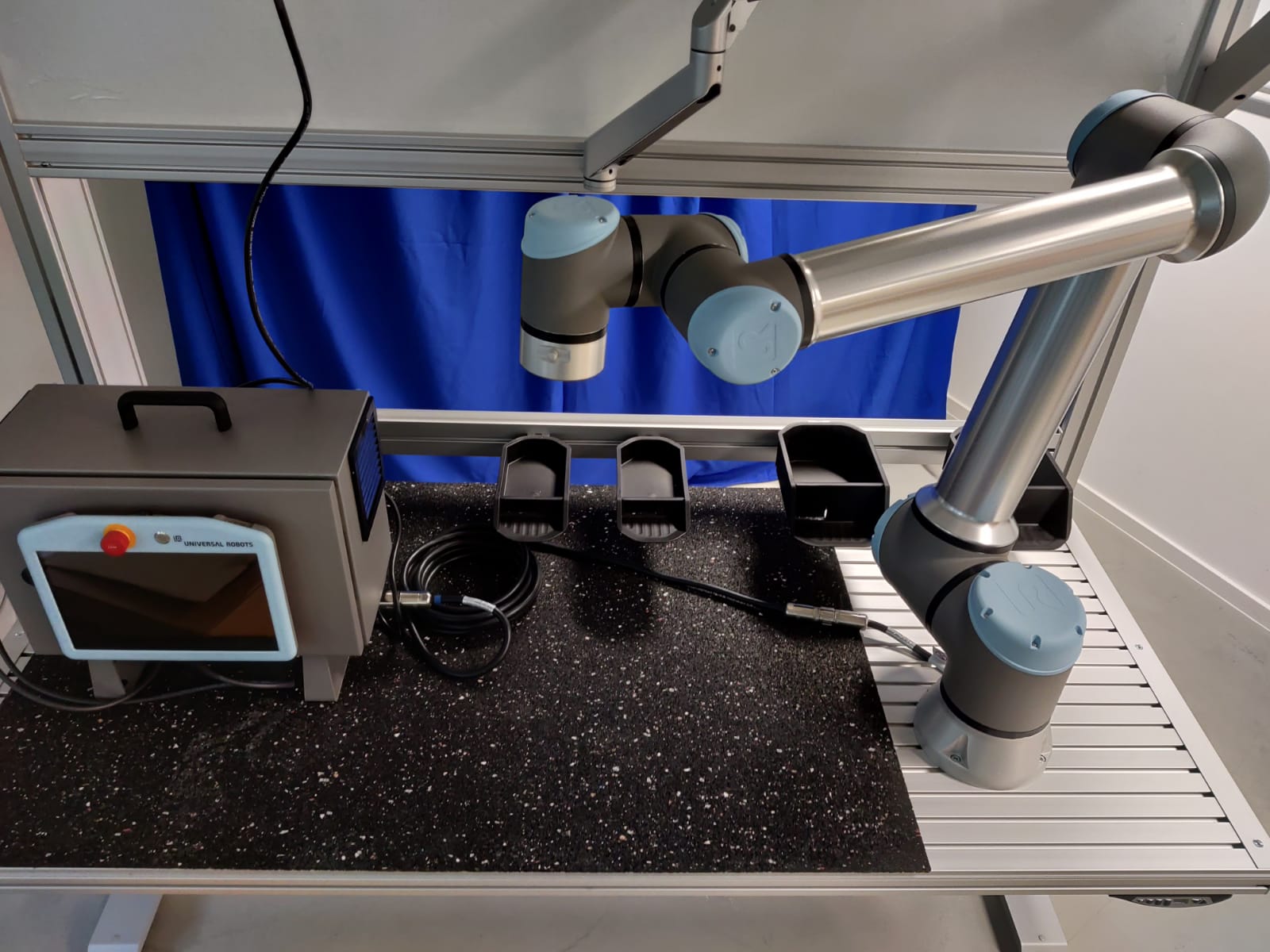
Das IGMR-Kobot-Team vergrößert sich mit der Inbetriebnahme des Universal Robot UR10e.
Das Kobot-Team im Kleinversuchfeld des IGMRs hat durch den Universal Robot UR10e Zuwachs bekommen. Mit einer Reichweite von 1.300 mm und einer Traglast von 10 kg ist er der leistungsstärkste und größte kollaborative Roboter im Team und eignet sich deswegen besonders gut für Pick-and-Place-, Palettierungs-, Verpackungs- und Montageaufgaben. Zudem ist er, einfach zu programmieren und schnell in neuen Anwendungen zu integrieren. Der Roboter wird im Rahmen des Next Generation Projekts eingesetzt und soll hier in Kombination mit einem Bin-Picking-System für das Aufnehmen und Handhaben von ungeordneten Blechbauteilen aus einem Bunker programmiert werden.
Internetseiten:
Ansprechparter:
Automatisierte Aufgabenplanung in industriellen Szenarien

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Die automatisierte Aufgabenplanung ist eine übergeordnete Steuerungsstrategie, die in Szenarien mit kollaborierenden Menschen und Robotern verwendet werden kann. Diese Strategie ist dazu nötig, um die Akteure und die auszuführenden Aufgaben zu bestimmen, welche zum Erreichen des Ziels ausgeführt werden müssen.
Für das folgende Industrieszenario werden mit dieser Strategie die Aufgaben berechnet, welche durch den Menschen und das FTS, also den beiden Agenten, ausgeführt werden müssen. Am Ende der Ausführung allen geplanten Aktionen sollen alle Gegenstände mit der Handbohrmaschine oder dem Nietwerkzeug bearbeitet wurden.
Die geplanten Aktionen werden zur Ausführung über ein spezielles Framework gesendet, welches in das Robot Operating System (ROS) integriert ist. Jede geplante Aktion wird über so genannte „Action Interfaces“ auf ihre konkrete Ausführung in der Simulation abgebildet. Im industriellen Szenario sind lediglich endliche Zustandsmaschinen als Action Interfaces integriert, wobei deren Zustände Akteur-spezifische Aufrufe an verschiedene ROS-Module darstellen.
Ansprechpartner:
MOOC Machine Dynamics with Matlab

Learn the basics of machine dynamics and use them to model, simulate and analyze the behavior of a car with the powerful tools provided by The MathWorks.
Are you keen to design a vehicle suspension using MATLAB? In this course, you will start at the very beginning of dynamic modelling, simulation and analysis of a technical system using different The MathWorks products. You will be introduced to a broad range of methodologies used in the field of machine dynamics. You will learn how to model a vehicle using the fundamentals of mechanics. You will get a deep understanding of the equations of motion and how to solve them using the powerful tools of The MathWorks. Eventually, you will gain the ability to analyze and interpret the computational results in order to optimize your design.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Contact:
Kurzfilm zum Projekt Next Generation
Menschen mit einer Schwermehrfachbehinderung in auf dem ersten Arbeitsmarkt integrieren. Ist das überhaupt möglich?
Wie dies mit kollaborativen Robotern möglich wird, zeigt ein Video zum Projekt NextGeneration auf dem Youtube-Kanal der Caritas Köln.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Internetseiten:
Ansprechparter:
Active Collision Avoidance in Human-Robot Collaboration
Against the background of human-robot collaboration, the IGMR at RWTH Aachen University is investigating innovative approaches for the safe design of partially automated assembly and production processes.
Commercially available cobots are usually equipped with speed and distance monitoring or power and force limitation according to ISO/TS 15066. In the event of a hazard situation or collision, corresponding robots therefore react by reducing movement speeds or stopping operation completely, which may adversely affect industrial processes.
The presented approach therefore demonstrates how collisions between humans and robots can be actively avoided. The method uses the kinematic redundancy of the KUKA LBR iiwa to avoid obstacles detected by sensors through the internal reconfiguration of the robot kinematics. The trajectory of the end effector is not changed in the process, so that the specified process sequence is maintained. In this context, alternative safety concepts can be developed to enable collision-free automation in the context of human-robot collaboration.
Active collision avoidance with the KUKA LBR iiwa – reference movement without obstacle avoidance:

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Active collision avoidance with the KUKA LBR iiwa – optimized motion course with obstacle avoidance through kinematic reconfiguration:

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Contacts:
Camera calibration in SHAREWORK – part 2
In october last jear we already showed how to calibrate a camera network. With the calibration target at that time, a calibration accuracy in the sub-pixel range could already be generated. However, at the high distances of about 8 meters and at a resolution of “only” 4MP, this is still several millimeters of deviation in the real world. For our final tests, we reached into the bag of tricks again and got ourselves a larger calibration target. Now, however, the maneuverability is no longer so simple. How such a calibration process looks like with a target of more than 3 square meters, you can see in the video.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Contacts:
IGMR Seminar 11.02.2021 13:00 Uhr: Wameq Kazemi, Freise Automation GmbH

Bildquelle: Freise Automation GmbH
Wir begrüßen Herrn Wameq Kazemi von Freise Automation GmbH zum IGMR Seminar.
Auch diese Veranstaltung wird weiterhin virtuell durchgeführt:
Im Vortrag wird Herr Kazemi die kollaborative Roboterserie HRC von Hanwha vorstellen und außerdem einen Einblick in die Programmierung der HRC Cobots geben.
Agenda:
o Vorstellung Freise Automation
o Vorstellung HRC Series
o Programmieren des HRC

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Zugangsdaten zum Online Meeting:
RWTH – Fresie Automation / Kollaborative Robotik
Do., 11. Feb. 2021 13:00 – 14:00 (CET)
Nehmen Sie an meinem Meeting per Computer, Tablet oder Smartphone teil.
https://global.gotomeeting.com/join/111521101
Sie können sich auch über ein Telefon einwählen.
(Bei Geräten, die diese Funktion unterstützen, ist die sofortige Teilnahme über eine der unten aufgeführten Direktwahlnummern möglich.)
Deutschland: +49 721 6059 6510
– Direktwahl: tel:+4972160596510,,111521101#
Zugangscode: 111-521-101
Sie kennen GoToMeeting noch nicht? Installieren Sie jetzt die App, damit Sie für Ihr erstes Meeting bereit sind: https://global.gotomeeting.com/install/111521101
Die Veranstaltungen im Wintersemester 2020/2021 werden in Zusammenarbeit mit dem VDI-GPP-Arbeitskreis des Bezirksvereins Aachen durchgeführt.
Ansprechpartner:
IGMR Seminar 08.02.2021 14:30 Uhr: Dr. Stefan Kurtenbach, Trapo AG

Wir begrüßen Dr. Stefan Kurtenbach von der Trapo AG zum IGMR Seminar. Auch diese Veranstaltung wird weiterhin virtuell durchgeführt:
Der Vortrag von Dr. Kurtenbach wird einen Eindruck der aktuellen Entwicklungen und Produkte von der Trapo AG geben.
Trapo Research and Development: Mobile Robotics
Montag, 08. Februar 2021 14:30 Uhr
Zoom Meeting Informationen:
https://rwth.zoom.us/j/98454895570?pwd=NkpiSWkyaTJtdWlralJrSUtnMDdDZz09
Meeting-ID: 984 5489 5570
Kenncode: 186393
Die Datenschutzhinweise zur Nutzung von Zoom und eine Handreichung für Teilnehmer (Studierende) können von den Seiten des CLS der RWTH Aachen University heruntergeladen werden.
Die Veranstaltungen im Wintersemester 2020/2021 werden in Zusammenarbeit mit dem VDI-GPP-Arbeitskreis des Bezirksvereins Aachen durchgeführt.
Weitere Informationen zum Thema können den folgenden Blogeinträgen entnommen werden:
Industrieprojekt Trapo Loading System
Ansprechpartner:
Aufbau der Next Generation Arbeitsplätze

Die Lieferung der Arbeitsplätze ist erfolgt, sodass der Aufbau und die Programmierung beginnen kann.
Kurz vor Weihnachten sind die Arbeitsplätze und das Zubehör beim IGMR der RWTH Aachen angekommen. Somit hat der Aufbau des Arbeitsplatzes begonnen und die Programmierung der Roboter für die Musteranwendungen kann starten.
Dazu sind der KUKA LBR iiwa 7 und der KINOVA JACO2 am Arbeitsplatz befestigt worden und werden für die verschiedenen Greifer (Adaptivgreifer, Parallelgreifer und 2-Finger-Greifer) sowie Bedienelemente konfiguriert. Zusätzlich werden die Roboter für die Musteranwendung der Industrieunternehmen programmiert. Die modulare Programmierung ist dabei essentiell, um die Teilnehmenden entsprechend ihrer Bedürfnisse bestmöglich zu unterstützen.
Im März 2021 werden die Teilnehmenden im Rahmen eines dreitägigen Workshops die Roboter kennenlernen und erproben. Mit den gewonnenen Erkenntnissen aus dem Erstkontakt wird der Arbeitsplatz entsprechend angepasst, damit die Roboter Mitte des Jahres in den Werkstätten der Caritas Wertarbeit Köln zum Einsatz kommen.
Projektseite: https://www.nextgeneration-mrk.de/
Ansprechpartner:


