

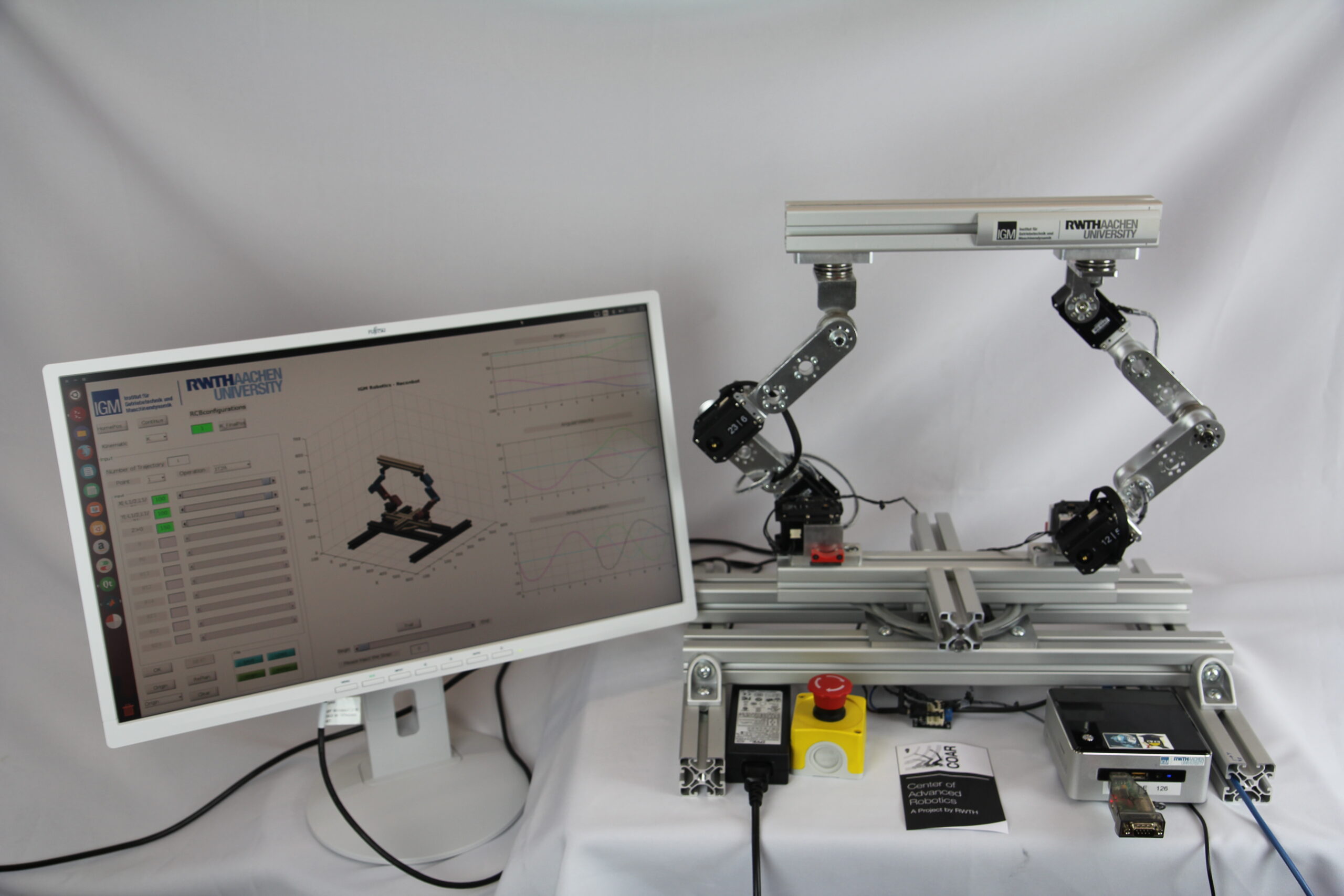
Durch die gezielte Beeinflussung der Roboterstruktur in Form von zusätzlichen Gelenken, können rekonfigurierbare Roboter synthetisiert werden. Diese zeichnen sich über zusätzliche innere Freiheitsgrade aus, welche eine innere Beweglichkeit des Roboters erlauben, ohne eine Posenänderung des Endeffektors zu bewirken. Dies wird häufig bei seriellen Strukturen zur Vermeidung von Kollisionen eingesetzt, wobei sich aber auch parallele Strukturen mit geschlossenen kinematischen Ketten dazu eignen. Am IGMR wurde der ReConBot als parallele Struktur entwickelt, welche durch die kinematische Redundanz auch für einen Strukturwechsel geeignet ist. So ist es möglich unterschiedlichste Konfigurationsräume miteinander zu verbinden und auch die Struktur von einem Vierglied oder Fünfglied zu realisieren, indem sonst aktuierte Gelenke antriebslos geschaltet werden. Der ReConBot zielt auf den hochflexiblen Einsatz in den anspruchsvollen Szenarien des Katastrophenschutz ab.
Ansprechpartner:


