

Schlagwort: ‘Industrie 4.0’
Innovations in textile technology: The DFG project SonicFibre
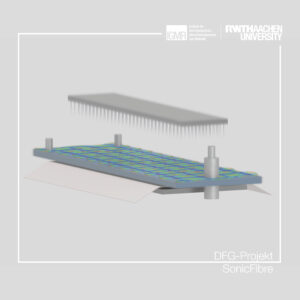
As part of our joint project at the Institute of Applied Mechanics (IAM) and @Institute of Textile Technology (ITA), we are working on an exciting development: the production of nonwovens with optimized efficiency.
💡 The challenge: During needling, a central process step, the fibers are entangled by mechanical movement in order to produce a stable nonwoven from a loose fiber bundle. This creates high frictional forces – a problem that leads to wear on the machine parts.
🔊 Our solution: We optimize the friction between the fibres through the targeted excitation of high-frequency vibrations in the ultrasonic range. Our focus is on stimulating a perforated plate in the ultrasonic range in such a way that a suitable vibration pattern is generated – and thus making the process more efficient and gentle.
You can find more information about the project here.
contact:
Johanens Bolk
IMBA training for the IIDEA project team

Our IIDEA-project team took part in a training course on the “Integration of people with disabilities into the world of work” (IMBA).
IMBA is positioned at the interface of medical and occupational rehabilitation and enables a precise description and comparison of work requirements and human abilities. The training covered the basics of IMBA, with a particular focus on the defined characteristics that serve as the basis for the assessment of work requirements and abilities. A highlight of the training was the introduction to the “Marie Plus” software, which is closely linked to the IMBA concept. The training was conducted by Torsten Alles, Ph.D., Managing Director of iqpr. His extensive knowledge and experience helped to emphasize the importance of IMBA in occupational therapy and activity-based medical rehabilitation.
We are convinced that this training will support our previous research and make a valuable contribution to the IIDEA project. We are grateful for the expertise we have gained through this training and look forward to applying the acquired knowledge in our daily work.
contact person:
Mathias Hüsing
Carlo Weidemann
Elodie Hüsing
Sophie-Charlotte Keunecke
Christina Jansen
Project launch IIDEA – Inclusion and integration through cobots on the labor market
In April, the innovative project “IIDEA – Inclusion and integration through cobots in the first labor market” was launched, which aims to empower the inclusion and integration of severely disabled people in the first labor market through collaborative robotics.
The deployment of cobots makes it possible to create new jobs and forms of work that satisfy the individual needs of severely disabled people. These new forms of work are not being established on the margins but at the heart of digitization and Industry 4.0.
In a rapidly changing world, we must focus on the needs of all people and ensure that everyone can reach their full potential. The IIDEA project is an important step towards an inclusive and inclusive society and economy.
For more information about the project, please visit the project profile. If you have any further questions, please feel free to contact our staff: iidea@igmr.rwth-aachen.de.
Contacts:
Prof. Mathias Hüsing
Carlo Weidemann
Sophie-Charlotte Keunecke
Elodie Hüsing
Christina Jansen
Cross section group: Application Dynamics

The Application Dynamics team is made up of members from all IGMR research areas. This allows the skills in vibration analysis and machine dynamics to be optimally combined with the expertise and many years of experience in power transmission and robotics. This fusion of the Institute’s internal research priorities enables solutions to be found to problems that require both technical knowledge of dynamics and application-specific expertise. This cross section of knowledge is applied, for example, in the form of a needs-based investigation and exploitation of the dynamic effects of a system. The focus is on applications in robotics and gearing, but also covers all types of mechanical motion systems. The current research horizon ranges from kinematic redundancy and high-speed trajectories to the use of neural networks to extend the workspace through innovative object manipulation.
Contact: Johannes Bolk
Workshop on environmental perception in Sharework
During the training workshop titled ‘Manufacturing Environment Perception for Effective Human-Robot Collaboration,’ we presented topics related to workspace monitoring and object recognition using simple learning methods. The presentation included a brief theoretical introduction to machine learning with random forests, an overview of the IGMR work packages in Sharework, and some tips for using these methods in your own projects. The presentation covered not only our work packages but also the contributions of our partners, particularly in the areas of ontology and motion primitives.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Contact:
Daniel Gossen
Development of new wrists for the Paragrip
In a joint research project of the IGMR together with the ISF of the RWTH Aachen University, the Multidirectional Additive Manufacturing (MDAM) of metallic components is being researched. In order to optimize the multi-armed. Paragrip robot for this application, student Raphael Hoffmann has developed an innovative concept of a new robotic wrist in his bachelor thesis. The concept enables the welding current to be conducted directly through the wristsm without the need for an additional ground cable attached to the print bed. Moreover, the wrists enable form fitting gripping of the print bed with self-centering to minimize positioning inaccuracies.
You can find the video on our YouTube channel: https://youtu.be/VdT1rjYG4D0
Contact:
Jan Wiartalla
Autonomous screw detection in SHAREWORK

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
In the SHAREWORK project, we have developed a method for detecting screws during the assembly of rotary tables. The method is easy to adapt and consists of two parts. First, test data is generated and the classifier is trained. The system can then be used in real applications. You can see exactly what this looks like in the video.
Contact:
Demonstration des lokalen Sicherheitssystems von SHAREWORK
Im EU-Projekt SHAREWORK haben wir kürzlich ein lokales Sicherheitssystem für Mensch-Roboter-Kollaboration fertiggestellt und in betrieb genommen. Wie dieses sich in der Praxis schlägt, zeigt unser Demo-Video.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Ansprechpartner:
Kurzfilm zum Projekt Next Generation
Menschen mit einer Schwermehrfachbehinderung in auf dem ersten Arbeitsmarkt integrieren. Ist das überhaupt möglich?
Wie dies mit kollaborativen Robotern möglich wird, zeigt ein Video zum Projekt NextGeneration auf dem Youtube-Kanal der Caritas Köln.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Internetseiten:
Ansprechparter:


