

Schlagwort: ‘Lokalisierung’
Semi-Automated Tile-Laying Aid

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
As part of the ErgoFli project, an innovative system is being developed in collaboration with project partners to help tile layers make their work more ergonomic and efficient.
In the video you can see how the system works in the Gazebo simulation environment. The robot automatically removes tiles from a magazine and matches them perfectly to the tiles already laid. With automatic processes, several tiles can be laid in succession to optimize the work process.
Our aim is to create a tool that not only reduces the workload for tilers, but also improves their working environment. We are excited about the progress and look forward to sharing more insights with you soon!
Find out more about the project here.
Contact person:
Mark Witte
Jan Wiartalla
Participation at European Robotics Forum (ERF) Hackathon 2022

As part of the European Robotics Forum (ERF) Hackathon 2022, six IGMR students demonstrated their talent in prototyping and working with robots. The hackathon challenge was set by Lely, among others. Their ‘Juno‘ mobile robots are autonomous cylindrical platforms whose main task is to move the fencing around cows on farms to make the feed pushed into the space accessible again. The hackathon task was similar: two Juno robots had to move along the walls of two interconnected rooms at a given distance. Additional restrictions and challenges were added for extra points. The team was successful at the hackathon in Rotterdam. After a neck-and-neck race, the first place went to TU Delft. At the award ceremony, we were praised as the most cooperative team for our “constant support of other teams in design and 3D printing“. This ‘exemplary behaviour‘ is much appreciated and we look forward to taking part again next year.
Special praise goes to our students Sebastian Polzin, Frederik van Kerkom, Jonas Braun, Oleksander Kutovyi, Ali Berger and Yannik Freischlad for their efforts. We congratulate TU Delft on their well-deserved victory and are happy to have won many new friends and valuable contacts. We thank the institute management for the opportunity to participate and look forward to next year.
Contact:
Development of new wrists for the Paragrip
In a joint research project of the IGMR together with the ISF of the RWTH Aachen University, the Multidirectional Additive Manufacturing (MDAM) of metallic components is being researched. In order to optimize the multi-armed. Paragrip robot for this application, student Raphael Hoffmann has developed an innovative concept of a new robotic wrist in his bachelor thesis. The concept enables the welding current to be conducted directly through the wristsm without the need for an additional ground cable attached to the print bed. Moreover, the wrists enable form fitting gripping of the print bed with self-centering to minimize positioning inaccuracies.
You can find the video on our YouTube channel: https://youtu.be/VdT1rjYG4D0
Contact:
Jan Wiartalla
Driverless transport systems
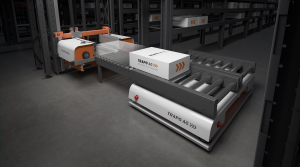
Image source: TRAPO AG
Autonomous transportations systems are being integrated into modern plants and warehouses. Trapo AG has developed with the support of IGMR of RWTH Aachen University a leading product in the industry, the Trapo Transport Shuttle (TTS). The IGMR staff was involved in the development and integration of the localization and navigation algorithms, in the creation of the state machines that determine the behavior of the TTS, and in the intensive testing phases. All methods and algorithms were integrated and configured in the ROS middleware. The whole system has already been successfully put into operation at the customer.
Contact person:
Stefan Bezrucav
Markus Schmitz
SLAM validation using iGPS

For the validation of localization and mapping algorithms (SLAM) for mobile robots, we use at IGMR the indoor Global Positioning System from Nikon.
SLAM is a classical problem in mobile robotics and still a current and challenging research topic. The current developments are focused in improving SLAM algorithms with respect to a high accuracy, generality, and robustness. For this reason, we validate our SLAM algorithms for mobile robotics with the Nikon iGPS which is used to generate a ground truth with a frequency of 40 Hz and an accuracy of 0.2 mm. In this way, critical inaccuracies and loop closure methods can be much better quantified and analyzed.
Project page:
Bots2Rec
Contact person:
Simon Schläger


