Schlagwort: ‘Prototypenbau’
Semi-Automated Tile-Laying Aid
https://youtu.be/2aJtSazLz1M
As part of the ErgoFli project, an innovative system is being developed in collaboration with project partners to help tile layers make their work more ergonomic and efficient.
In the video you can see how the system works in the Gazebo simulation environment. The robot automatically removes tiles from a magazine and matches them perfectly to the tiles already laid. With automatic processes, several tiles can be laid in succession to optimize the work process.
Our aim is to create a tool that not only reduces the workload for tilers, but also improves their working environment. We are excited about the progress and look forward to sharing more insights with you soon!
Find out more about the project here.
Contact person:
Mark Witte
Jan Wiartalla
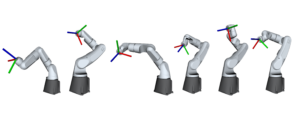
Rapid Prototyping in the development of robot hardware

As part of the RobWeld project, new wrists and gripping mechanisms were developed for the PARAGRIP developed and built at IGMR.Through iterative design processes using rapid prototyping in 3D printing, we have perfected functionalities, ease of assembly and the manufacturability of components. The result? An elaborate design that combines steel and aluminum components.In the next step, the design can now be extensively tested before it is used on the robot.
You can find more information about the RobWeld project here.
Contact person:
Jan Wiartalla