

Schlagwort: ‘Trapo AG’
Developments with Trapo GmbH

The IGMR – RWTH Aachen supports Trapo GmbH in the further development and integration of trajectory planning and trajectory execution algorithms for the new Trapo Loading System robot. Compared to the old TLS, the navigation of the new TLS is realized with the MoveBase Framework of the Robot Operating System (ROS). For this purpose, together with Trapo GmbH, we have created a special configuration for car-like structure for the local MoveBase Planner. The new TLS was last presented at the LogiMat trade fair.
Contact:
Daniel Gossen
AKPro students present impressive project results at Trapo AG

Last year the projects for the course “Applied Design and Product Development I / II” were provided and supervised by Trapo AG. Now the students had the opportunity to visit Trapo AG in Gescher and present the results to the management, and after the presentations the students were able to visit the different areas of Trapo AG and have a look at the production and finishing. Congratulations to all AKPro participants on the very successful completion of their projects! Many thanks to Trapo AG for supporting the projects and for the opportunity to visit.
Contacts:
Driverless transport systems
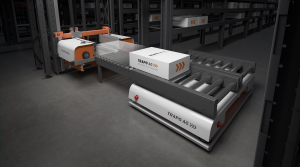
Image source: TRAPO AG
Autonomous transportations systems are being integrated into modern plants and warehouses. Trapo AG has developed with the support of IGMR of RWTH Aachen University a leading product in the industry, the Trapo Transport Shuttle (TTS). The IGMR staff was involved in the development and integration of the localization and navigation algorithms, in the creation of the state machines that determine the behavior of the TTS, and in the intensive testing phases. All methods and algorithms were integrated and configured in the ROS middleware. The whole system has already been successfully put into operation at the customer.
Contact person:
Stefan Bezrucav
Markus Schmitz
Industrial project Trapo Loading System

Image source: Pressemitteilung Trapo AG
IGMR – RWTH Aachen supports Trapo AG in the development and integration of trajectory planning and trajectory execution algorithms, environment perception and communication with the PLC for the new Trapo Loading System robot.
Link to the press release of Trapo AG:
https://www.trapo.de/de/presse/artikel/das-tls-3600-entzerrt-die-gefahrenzone-im-be-und-entladebereich/
Contact person:
Stefan Bezrucav
Markus Schmitz


