

Übung mit der Fanuc Education Cell im Modul Robotic Systems
Im Rahmen der praktischen Übung des Moduls https://www.igmr.rwth-aachen.de/index.php/de/lehrveranstaltungen/rs wird in unserem Robotic Lab die Fanuc Education Cell mit der Software Roboguide eingesetzt.
Die Studierenden lernen die grundlegende Bedienung einer Roboterzelle und setzen eigenhändig ein Logistik Szenario mit Hilfe der Software Roboguide um. Auch in diesem Semester können wir die praktischen Übungen remote aufrechterhalten. Dazu wurden umfangreiche Lehrmaterialien digitalisiert, damit die Studierenden von ihren eigenen Computern die Aufgabe simulativ lösen können.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Internetseite zur Lehrveranstaltung:
https://www.igmr.rwth-aachen.de/index.php/de/lehrveranstaltungen/rs
Ansprechpartner:
Markus Schmitz
Den KUKA iiwa durch Handführung anlernen
Die Handführung des kollaborativen Roboters KUKA iiwa eignet sich gut zur Programmierung von Raumpunkten. Dies ist sowohl innerhalb eines Programms als auch im T1-Modus des Roboters möglich.
https://youtu.be/v7D4yknlxJI
Im Video wird die Handführung des KUKA iiwa innerhalb eines Programms gezeigt. Der Roboter lässt sich per Hand am Flansch führen, wenn der Anwender den grauen Zustimmtaster betätigt. Nach dem Loslassen, fragt das Programm, ob die aktuelle Position korrekt ist und abgespeichert werden soll. Anschließend können beliebig viele weitere Positionen hinzugefügt werden. Am Ende des Programms werden alle gespeicherten Raumpunkte in der angelernten Reihenfolge abgefahren.
Ansprechpartner:
Robotergeführte Formenerkennung und Beschichtung

Automatische Formerkennung über Laserscanner und Trajektorienplanung für die Beschichtung.
Im Rahmen dieses Projekts werden die Formen erkannt und ihre Kanten durch einen Laserscanner realisiert, der am Endeffektor des Roboters montiert ist. Die gesammelten Daten werden synchronisiert und gefiltert, und es wird eine geeignete Trajektorie für die Beschichtung der Innenfläche der Formulare erstellt. Mehrere Variablen, wie z.B. die Geschwindigkeit der Düse, Abstände und Lücken, die Größe der Düse und der Outlier für eine homogene Beschichtung können während der Trajektorienplanung ausgewählt werden.
Das Projekt wurde in Kooperation mit International Partners in Glass Research e.V. durchgeführt.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Ansprechpartner:
Kamerakalibrierung in SHAREWORK
Im EU-Projekt SHAREWORK wird ein Framework für die Industrie entwickelt, dass es erlaubt Mensch-Roboter-Kollaboration auch mit schweren Industrierobotern durchzuführen. Wir entwickeln dazu kamerabasierte Methoden zur Lokalisierung von Gegenständen im Arbeitsraum und leiten daraus Prozesszustände ab, die wiederum in einer Aufgabenplanung weiterverarbeitet werden können.
Zur Inbetriebnahme des Kameranetzwerks haben wir vier Stereolabs ZED Stereokameras in unserer Halle aufgebaut und kalibriert. Bei der Kalibrierung kamen sowohl Zufalls-, Schachbrett-, Aruco-, als auch ChAruco-Muster zum Einsatz. Letztlich haben wir es geschafft die Kameras auf Sub-Pixelgenauigkeit zu kalibrieren. Im Video seht ihr ein paar Daten aus unseren Kalibriersets. Aktuell werden die Daten aufbereitet und wir hoffen in wenigen Wochen mehr zeigen zu können.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Projektseite:
https://www.igmr.rwth-aachen.de/index.php/de/rob/rob-sharework
Ansprechpartner:
Robot Companion: Ein mobiler Helfer in der Not
Robot Companion ist ein Framework, mit dem Roboterverfolgersysteme einfach und kostensparend umgesetzt werden können. Dazu entwickelt das IGMR Methoden zum Tracking mit unterschiedlicher Sensorik (Laser, Radar, Kamera), agiler Pfadplanung und Ansteuerung.
Das aktuelle Anwendungsziel von Robot Companion ist es, einen Roboter für Notretter bereitzustellen. Dabei folgt der Roboter den Einsatzkräften autonom und ermöglicht den Transport von Material und Ausrüstung, sowie den Abtransport von Schutt und Verunglückten. Ein erster Weg zu dieser Vision wurde mit dem Grundmodul umgesetzt. Das Grundmodul verfügt über Methoden zum Tracking mit Kamera und Laser und ermöglicht die autonome Verfolgung eines Operators.
Im Video zu erkennen sind die Tracks des vertikalen und horizontalen Trackers, sowie der Zustand der Detektion (oben rechts). In einem Verfolgungstest konnte eine Genauigkeit von 100% bei niedrigen Geschwindigkeiten erreicht werden.
https://youtu.be/imU8j2zlQrQ
Projektseite:
https://www.igmr.rwth-aachen.de/index.php/de/rob/rob-comp
Ansprechpartner:
Next Generation – mit flexiblen Roboterlösungen inklusive Arbeit entwickeln
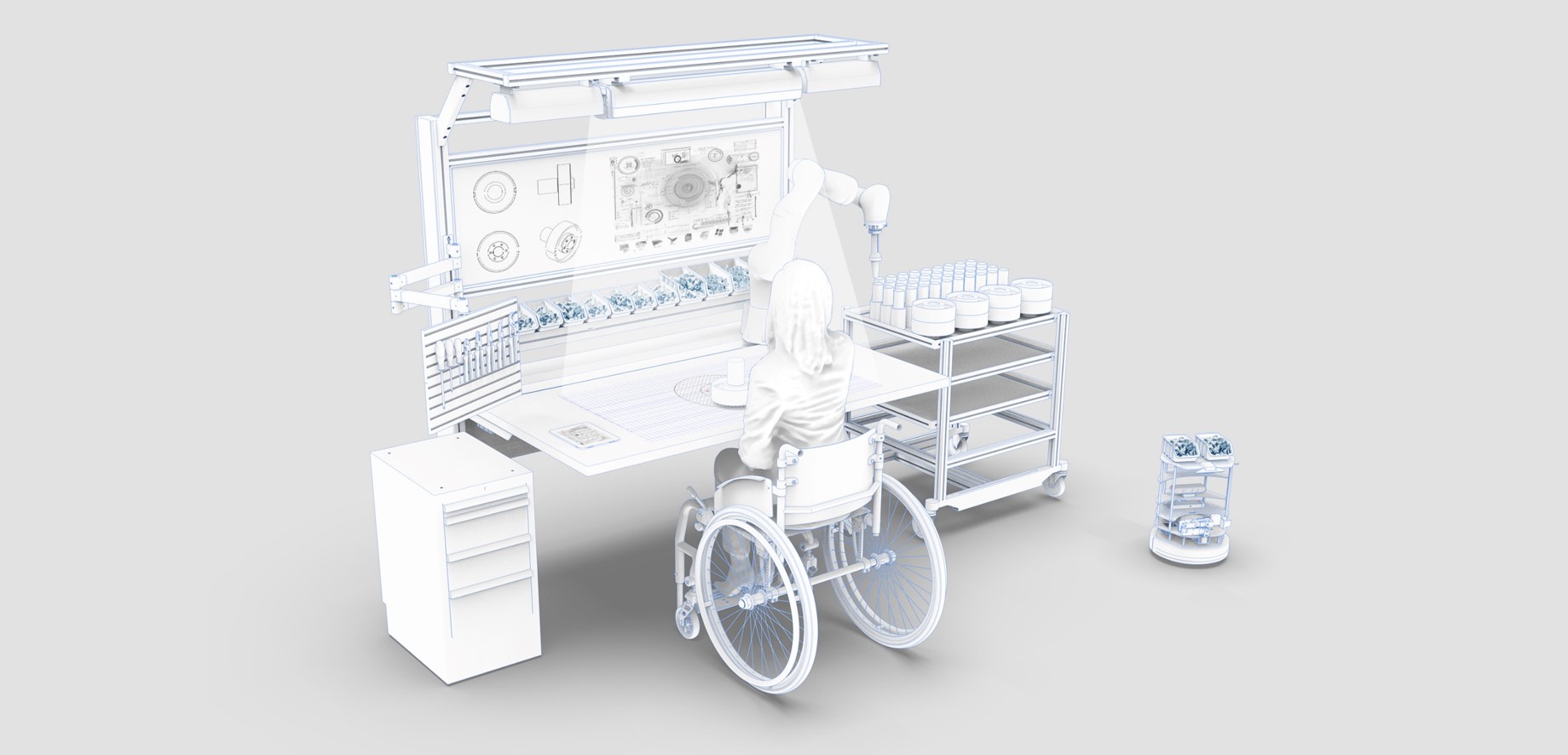
Das Projekt Next Generation verfolgt das Ziel inklusive Arbeitsplätze mithilfe von Mensch-Roboter-Kollaboration (MRK) zu
entwickeln, um Lebensqualität zu steigern.
Menschen mit Schwerst- und Mehrfachbehinderung arbeiten meist unterhalb ihren
persönlichen kognitiven Fähigkeiten. Dies sorgt bei den Betroffenen für große Unzufriedenheit.
Aus diesem Grund gilt es innerhalb des Projekts „Next Generation – mit flexiblen
Roboterlösungen inklusive Arbeit entwickeln“ Arbeitsplätze mithilfe von Mensch-Roboter-
Kollaboration (MRK) zu entwickeln. Das Projekt soll Menschen mit Behinderung ermöglichen, am
Arbeitsleben teilzunehmen. Dies kann sowohl die Lebensqualität steigern als auch
Selbstverwirklichung, Selbstbestimmung und eine positive Persönlichkeitsentwicklung mit sich
führen.
Für Aufgaben aus der Industrie wurden zahlreiche Unternehmen aus dem Großraum Köln
gebeten, mögliche Musteranwendungen für die Konzeption des inklusiven Arbeitsplatzes zur
Verfügung zu stellen. Dabei wurden zwei Tätigkeiten zum einen bei der Buschhoff Stanztechnik
GmbH & Co. KG und zum anderen bei der Cölner Hofbräu P. Josef Früh KG identifiziert. Die
Konzeption und Umsetzung kann nun beginnen. Weitere aktuelle Informationen gibt es auf der
Website des Next Generation-Projektes.
Ansprechpartner:
Fahrerlose Transportsysteme
Bildquelle: TRAPO AG
Fahrerlose Transportsysteme werden immer häufiger in modernen Anlagen und Lager integriert. Trapo AG hat ein führendes Produkt in der Branche, der Trapo Transport Shuttle (TTS), mit der Unterstützung vom IGMR der RWTH Aachen entwickelt. Die Mitarbeiter des IGMR waren bei der Entwicklung und Integration von den Lokalisierung- und Navigationsalgorithmen, bei der Erstellung der Zustandsmaschinen, durch welchen das Verhalten vom TTS bestimmt ist, und bei den intensiven Testphasen involviert. Alle Methoden und Algorithmen wurden in der ROS Umgebung integriert und konfiguriert. Das ganze System wurde schon erfolgreich beim Kunde im Betrieb genommen.
Ansprechpartner:
Stefan Bezrucav
Markus Schmitz
Kooperative mobile Manipulation in Produktionslinien im „Internet of Production“

Anwendungen der mobilen Manipulation in den Arbeitsumgebungen der „Factory of Future“.
Internet of Production (IoP) hat die Vision, die domänenübergreifende Zusammenarbeit in Produktionslinien auf einer neuen Ebene zu ermöglichen. Die Mobilisierung von Roboter-Agenten und Ressourcen sind die Essenzen der Produktionslinien der Fabrik der Zukunft. Um die Roboteragenten in die Lage zu versetzen, auf die Änderung der Produktionslinien zu reagieren, suchen wir im IGMR nach dynamischer Bewegungsplanung und -steuerung der mobilen Manipulatoren.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Weitere Informationen zum Internet of Production:
https://www.igmr.rwth-aachen.de/index.php/de/rob/rob-iop
https://www.iop.rwth-aachen.de
Ansprechpartner:
Multidirektionale Additive Fertigung im Lichtbogenschweißverfahren

Im Zusammenarbeit mit dem ISF, RWTH Aachen forschen wir am IGMR an der Multidirektionalen Additiven Fertigung. In dieser Anwendung zur Herstellung von Metallbauteilen.
Die Multidirektionale Additive Fertigung ermöglicht sowohl im klassischen FDM-Verfahren mit Kunststoff als auch bei schichtweisen Aufbau im Lichtbogenschweißverfahren die Herstellung von komplexen Bauteilen ohne Stützstrukturen. Am IGMR wird dazu die gesamte Prozesskette der Additiven Fertigung auf die besonderen Herausforderungen dieses Verfahren aus robotischer Sicht erweitert. Dazu gehört die Zerlegung eines virtuellen Bauteils in Schichten (Slicing), die anschließende Planung eines kollisionsfreien Aufbaus, die Generierung von ausführbaren Roboterpfaden zum Ausfüllen der Schichten sowie der notwendigen Trajektorienplanung.
https://youtu.be/vYejNjBSUp8
Ansprechpartner:
Markus Schmitz
Carlo Weidemann
Industrieprojekt Trapo Loading System

Bildquelle: Pressemitteilung Trapo AG
Das IGMR – RWTH Aachen unterstützt die Trapo AG bei der Entwicklung und Integration von Trajektorieplanung- und Trajektorieausführungsalgorithmen, Umgebungwahrnehmung und Kommunikation mit dem PLC für den neuen Trapo Loading System Roboter.
Link zur Pressemeldung der Trapo AG.
Ansprechpartner:
Stefan Bezrucav
Markus Schmitz


