

Schlagwort: ‘Roboter’
Inspirierender Gastvortrag von FANUC Deutschland

Wir hatten das große Vergnügen, Frank Schwabe von FANUC Europe – Technical Center RO zu einem spannenden Gastvortrag in unserem Kurs „Robotic Systems” begrüßen zu dürfen. Herr Schwabe gab unseren Studierenden eine spannende Einführung in die Industrierobotik und stellte die Technologien, das Produktportfolio und reale Anwendungen von FANUC in der Automatisierung vor. Die Studierenden waren hoch motiviert, stellten viele aufschlussreiche Fragen und erhielten wertvolle Einblicke, wie moderne Robotik die heutigen Fertigungsumgebungen prägt. Ein großes Dankeschön an Herrn Schwabe und FANUC für ihre Unterstützung und die Inspiration der nächsten Generation von Ingenieuren!
IIDEA beim daaap-Jahrestreffen 2025 in Koblenz

Im März durften wir als Aussteller und Netzwerkmitglied von daaap am diesjährigen Jahrestreffen bei den Rhein-Mosel-Werkstätten in Koblenz teilnehmen.
Ein besonderes Highlight: Die Veranstaltung wurde unter anderem von Frau Schall, Ministerin für Arbeit, Soziales, Transformation und Digitalisierung in Rheinland-Pfalz, eröffnet. Sie nahm sich Zeit, das IIDEA-Projekt kennenzulernen und konnte unseren Musterarbeitsplatz sogar selbst ausprobieren.
Wir freuen uns sehr über das Interesse der teilnehmenden Werkstätten an unserem Projekt. Der direkte Austausch, wertvolle Gespräche und neue Kontakte zeigen: Die Vision von inklusiver Digitalisierung wird geteilt und weitergetragen.
Ansprechpartner:
Mathias Hüsing
Bronze bei der Deutschen Meisterschaft in Robot System Integration

Herzlichen Glückwünsch an Esteban und Gregory – sie haben bei der diesjährigen Meisterschaft bei FANUC in Neuhausen den 3. Platz belegt und damit Bronze gewonnen!
Die Aufgabe: Eine anspruchsvolle Batteriebestückung, die in nur drei Tagen gelöst werden musste. Das Niveau war dieses Jahr besonders hoch und zum ersten Mal waretn acht Teams dabei.
Wir sind sehr stolz auf unsere beiden Talente! Vielen Dank an Sophie Charlotte, die diese Teilnahme möglich gemacht hat!
Ansprechpartnerin:
Sophie Charlotte Keunecke
Automatisierte robotische Demontage – Schraubenerkennung und -entfernung für das Recycling von EV-Batterien
Vollautomatische Demontage mit Präzision!
Unser neues robotisches System revolutioniert die Demontage von E-Auto-Batterien. Mithilfe des Neura Lara 8 Roboters und modernster Bildverarbeitungstechnologien erkennen wir Schrauben vollautomatisch und positionieren den Roboter präzise, um sie sicher zu entfernen.
Durch die Integration von YOLOv8 und Intel RealSense Tiefenkameras kann das System Schrauben in Echtzeit lokalisieren und selbstständig die optimale Positionierung vornehmen. Kein manuelles Eingreifen nötig – das System arbeitet komplett autonom!
Unser Ziel: Den Recyclingprozess sicherer, schneller und effizienter zu machen. Weniger Risiken für die Arbeiter und gleichzeitig eine Maximierung der Rohstoffrückgewinnung. Das ist die Zukunft der Kreislaufwirtschaft!
Weitere Informationen zu #dimonta findet ihr hier.
Ansprechpartner:
Markus Schmitz
Daniel Gossen
IMBA-Schulung für das IIDEA-Projektteam

Unser IIDEA-Projektteam hat an einer Schulung zur „Integration von Menschen mit Behinderungen in die Arbeitswelt“ (IMBA) teilgenommen.
IMBA ist an der Schnittstelle von medizinischer und beruflicher Rehabilitation positioniert und ermöglicht eine präzise Beschreibung und Vergleich von Arbeitsanforderungen und menschlichen Fähigkeiten. In der Schulung wurden die Grundlagen von IMBA vermittelt, mit einem besonderen Fokus auf den definierten Merkmalen, die als Grundlage für die Bewertung von Arbeitsanforderungen und Fähigkeiten dienen. Ein Höhepunkt der Schulung war die Einführung in die Software „Marie Plus“, die eng mit dem IMBA-Konzept verbunden ist. Die Schulung wurde von Torsten Alles, Ph.D., dem Geschäftsführer des iqpr, durchgeführt. Sein umfassendes Wissen und seine Erfahrung haben dazu beigetragen, die Bedeutung von IMBA in der Arbeitstherapie und der tätigkeitsorientierten medizinischen Rehabilitation zu unterstreichen.
Wir sind überzeugt, dass diese Schulung unsere bisherige Forschung unterstützen wird und einen wertvollen Beitrag zum IIDEA-Projekt leisten wird. Wir sind dankbar für die Expertise, die wir durch diese Schulung gewonnen haben, und freuen uns darauf, die erworbenen Kenntnisse in unserer täglichen Arbeit anzuwenden.
Hier findet ihr weitere Informationen zum IIDEA-Projekt.
Ansprechpartner:
Mathias Hüsing
Carlo Weidemann
Elodie Hüsing
Sophie-Charlotte Keunecke
Christina Jansen
Erforschung der automatisierten Fähigkeitsabschätzung für Mensch-Roboter-Teaming

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
In unserer Mensch-Roboter-Teaming (MRTeam) Gruppe haben wir die Vision, dass eines Tages Mensch und Roboter nahtlos und intuitiv in einer Art Mensch-Maschine-Symbiose miteinander arbeiten können. Zuletzt haben wir ein Explorationsanwendung implementiert, um das Potenzial der Mensch-Roboter-Teams zu demonstrieren. Die Exploration beinhaltet ein System zur Abschätzung der menschlichen Fähigkeiten, um das menschliche Potenzial zu bewerten und entsprechende Roboteraktionen abzuleiten.
In Zukunft können Roboter die ermittelten Fähigkeitsdeltas nutzen, um Lücken zwischen der menschlichen Leistungsfähigkeit und den Anforderungen des Arbeitsprozesses zu finden. Auf der Grundlage dieser Deltas werden Aktionen abgeleitet, die dem Menschen eben nicht die Arbeit wegnehmen, sondern die menschlichen Fähigkeiten erhöhen, bis die Anforderungen erfüllt sind. Solche Systeme ermöglichen es dem Mensch-Roboter-Team, einen Zustand zu erreichen, der dem sogenannten Flow ähnelt.
Ansprechpartner:
Carlo Weidemann
Deutsche Meisterschaft im Robot System Integration 2022

Auch in diesem Jahr hat das IGMR mit großem Erfolg an der deutschen Meisterschaft (ehemals Olympiade) im Robot System Integration bei FANUC Deutschland teilgenommen!
Die Aufgabe in diesem Jahr war eine variable Bestückung von Kisten und eine Palettierung dieser. Zur Umsetzung gehören neben dem eigenständigen Aufbau der gesamten Zelle real und virtuell auch das digitale Zeichnen von Bauteilen, die Einstellung von Sicherheitsfunktionen, Fehlererkennung, Nutzerfreundlichkeit und Hinweisgebungen, sowie Sensor-, Aktor- und Kameraintegration.
Unter dem Teamnamen „IGMR“ traten Simon Strauch und Florian Menz an, als Team „RWTH“ waren Frederick van Kerkom und Sebastian Polzin dabei. Als Coach begleitete Sie die ehemalige Teilnehmerin, Sophie Charlotte Keunecke.
Die vier Studierenden haben sich in den vergangenen Monaten in ihrer Freizeit selbstständig mit der FANUC Education Cell im IGMR beschäftigt und die TP-Programmierung und Simulation in RoboGuide erlernt. Die Mühe hat sich gelohnt!
Team IGMR hat eine sehr beeindruckende reale und virtuelle Cell-Installation präsentiert und jegliche Menüoptionen zur Kundenfreundlichkeit und zur Fehlerhandhabung implementiert.
Team RWTH erreichte in beiden Zeitmessungen die schnellsten Rundenzeiten mit 57 Sekunden und glänzte mit einer überaus detaillierten Simulation und Dokumentation. Wir sind sehr stolz auf alle vier Teilnehmer auf ihre großartige Leistung!
Vielen Dank an FANUC Deutschland für die großartige Umsetzung und die außergewöhnliche Zusammenarbeit.
Die FANUC Education Cell ist ein fundamentaler Bestandteil der praktischen Lehre in der Robotik und bietet Studierenden die Möglichkeit, den Umgang mit Industrierobotern und die Verwendung von Frames (Koordinatensystemen) zu erproben und eigene Versuche und Messungen durchzuführen oder zu verifizieren.
Ansprechpartner: Sophie Charlotte Keunecke
Programmierkurse mit der FANUC Education Cell und RoboGuide


Einer der wesentlichen Faktoren bei der Arbeit mit Robotern am IGMR ist nicht nur die theoretische Betrachtung, Berechnung und Optimierung der Bewegung oder Mechanik, sondern insbesondere auch die praktische Arbeit und der Umgang mit den Systemen sowie auch die verschiedenen Programmierungen. Eines der Kernstücke dieser praktischen Lehre ist die FANUC Education Cell, welche auch in der Vorlesung Robotic Systems und den Robotik-Kursen der International Academy ein fundamentaler Bestandteil ist. Neben den Vorlesungen bietet das IGMR vertreten durch Carlo Weidemann, Gewinner der FANUC Olympiad 2020, auch interne Anwenderkurse für Mitarbeiter an und bietet diesen die Möglichkeit, selbstständig an der Zelle arbeiten zu können.
Sie studieren an der RWTH und haben Interesse, mit Robotern wie dem FANUC LR Mate 200iD 4S zu arbeiten oder Projekte umzusetzen? Vielleicht haben Sie auch eine konkrete Idee für eine Abschlussarbeit mit dem Roboter? Dann melden Sie sich gerne bei uns. Wir freuen uns!
Ansprechpartner:
Carlo Weidemann
Sophie Charlotte Keunecke
Erste Bewegung des PARAGRIPs mit neuer Steuerung
Um für seine zukünftigen Aufgaben in der Multidirektionalen Additiven Fertigung (MDAM) mittels Lichtbogenschweißen (WAAM) optimal gewappnet zu sein, wurde die Steuerungsarchitektur des PARAGRIPs grundlegend überarbeitet. Ab sofort können Bewegungen aller vier Arme unter ROS2 mit MoveIt geplant, simuliert und am echten Roboter ausgeführt werden. Dabei werden die Gelenkstellungen des physischen Roboters stets an ROS2 zurückgespielt, wodurch eine Integration von online-Planungsalgorithmen in der Zukunft ermöglicht wird. Das Video zeigt die Planung und Ausführung einer einfachen Testbewegung des PARAGRIPs.
Weitere Informationen zu dem Projekt findet ihr hier.
Ansprechpartner: Jan Wiartalla
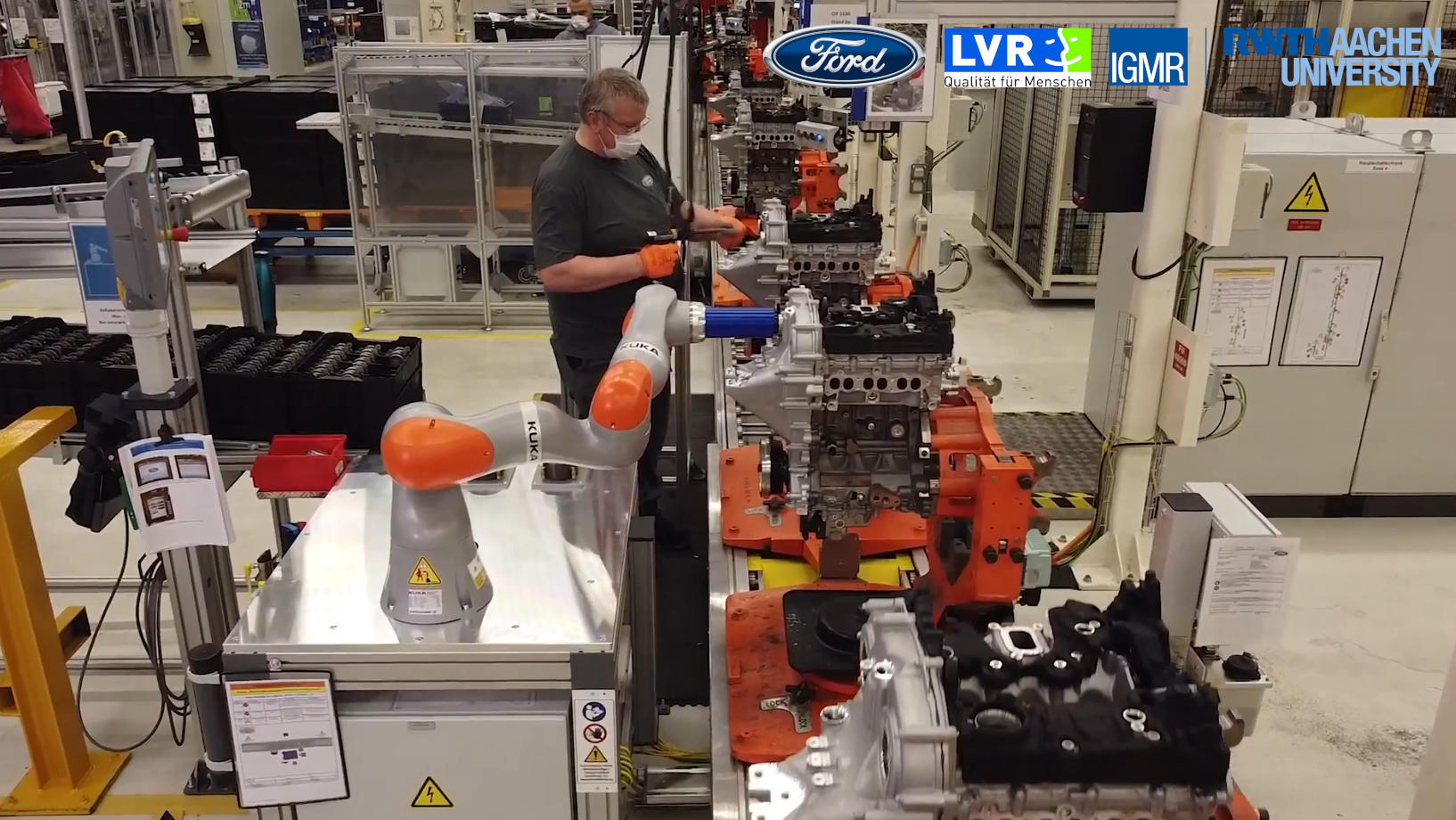
Kollaborierender Roboter bei Ford schafft Jobs für leistungsgewandelte Beschäftige
- Ford richtet mit Hilfe eines kollaborierenden Roboters einen Arbeitsplatz für Beschäftigte mit Schwerbehinderung ein
- Einzigartig ist die enge räumliche Zusammenarbeit zwischen Mensch und Roboter
- Nach ersten Probeläufen reibungslose Zusammenarbeit
- Ford hat zusammen mit der Rheinisch Westfälischen Technischen Hochschule Aachen (RWTH) und dem Landschaftsverband Rheinland (LVR) diesen einmaligen Arbeitsplatz mit einer neuen Version eines kollaborierenden Roboters eingerichtet
AACHEN, 16. August 2021 – Ford hat die Einrichtung eines einzigartigen kollaborierenden Roboters erfolgreich abgeschlossen. Nach rund einem Jahr Forschung, Entwicklung, Mitarbeiterschulung und Trockenläufen arbeitet der so genannte Kobot, ein Wortspiel aus kollaborierend (zusammenarbeitend) und Roboter, nun taktgebunden im Linienfluss im Kölner Motorenwerk des Automobilherstellers. Dort setzt er gemeinsam mit seinem menschlichen Partner VCT-Magnetspulen in einen Öler ein, nimmt die Magnetspulen anschließend auf und presst sie in den Stirndeckel des Motorblocks. Diese Arbeit erfordert große Eindruckkräfte, die selbst für gesunde Arbeitende auf Dauer belastend sein können, und die nun der Kobot für den Menschen übernimmt. Bei den menschlichen Partnern handelt es sich um Beschäftigte mit Schulter- und Handgelenkproblemen. So konnte ein Arbeitsplatz für zwei Beschäftigte mit Schwerbehinderung geschaffen werden.
Ford, die Rheinisch Westfälisch Technische Hochschule in Aachen (RWTH) sowie der Landschaftsverband Rheinland (LVR) forschten rund ein Jahr lang an dieser neuen Einsatzmöglichkeit für einen kollaborierenden Roboter. Das vom LVR mit 372.000 Euro geförderte Modellprojekt hatte das Ziel, den Roboter dergestalt in eine Fertigung einzubauen, dass ein schwerbehinderter Mensch sich einen Arbeitsplatz mit einem Roboter teilt. Das Besondere daran ist die Konfiguration des Roboters, so dass er mit dem Menschen interaktiv „Hand in Hand“ arbeitet und nicht durch eine trennende Schutzeinrichtung, wie z.B. einen Maschinenschutzzaun, getrennt sein muss. Neben der exakten Programmierung des Roboters war auch eine intensive Schulung der Beschäftigten nötig, damit sie einerseits die „Scheu“ vor diesem Kobot ablegen, zum anderen trotzdem noch die nötige Vorsicht walten lassen. Roboter werden seit vielen Jahrzehnten in der Automobilindustrie eingesetzt, allerdings zumeist als überdimensional große Maschinen, die hinter Schutzvorrichtungen arbeiten oder als autonome Fahrroboter, die Materialien transportieren. In diesem Fall bestand die Herausforderung darin, den Arbeitsplatz so zu gestalten, dass sowohl die Voraussetzungen der taktgebundenen Fertigung, die Anforderungen der Arbeitssicherheit als auch die barrierefreie Gestaltung des Arbeitsplatzes berücksichtigt sind.
„Ich bin stolz, dass wir mit diesem Vorzeigeprojekt einen Arbeitsplatz so umgestalten konnten, dass wir ein weiteres Angebot für leistungsgewandelte Beschäftigte haben“, so Dirk Heller, Geschäftsführer Fertigung Ford-Werke GmbH. „Die Akzeptanz unter der Belegschaft ist groß, und besonders die an diesem Arbeitsplatz eingesetzten Mitarbeiter freuen sich auf die neue Aufgabe.“
„Gemeinsam haben wir einen einzigartigen kollaborativen Arbeitsplatz in der Industrie umgesetzt. Ich kenne kaum solch erfolgreich umgesetzte Kollaborationsarbeitsplätze“, erklärt Mathias Hüsing, Professor an der RWTH Aachen. „Warum dieser Mangel? Die menschenzentrierte Arbeitsplatzplanung unter Berücksichtigung von Montageaufgaben, technischen Möglichkeiten und Sicherheitsanforderungen ist (noch) nicht etabliert. Unsere Forschung im Bereich kollaborativer Prozessplanung fokussiert dieses. Inzwischen setzen wir Kollaborationsarbeitsplätze erfolgreich bei anderen Projekten um, wo es darum geht, Arbeitsplätze für Menschen mit Behinderungen auf dem ersten Arbeitsmarkt mit Unterstützung von kollaborierenden Robotern einzurichten.“
„Mit den Mitteln der Ausgleichsabgabe hat das LVR-Inklusionsamt in den letzten Jahren schon auf sehr vielfältige Weise Arbeitsplätze bei Ford umgestalten und sichern können. Das ist eine über die Jahre gewachsene und sehr gute Kooperation zwischen Ford und LVR mit großem Nutzen für die Förderung von Inklusion auf dem Arbeitsmarkt“, ergänzt Christoph Beyer, Leiter des LVR-Inklusionsamtes. „Auch die Erkenntnisse aus dem aktuellen Modellprojekt Kobot helfen uns enorm dabei, die Beschäftigungsmöglichkeit von Menschen mit Behinderung erweitern und neue technische Entwicklungen nutzen zu können. Ford hat hier als großes Unternehmen im Rheinland eine bedeutende Vorbildunktion inne.“
Das Institut für Getriebetechnik, Maschinendynamik und Robotik der RWTH Aachen begleitet das Projekt wissenschaftlich und entwickelt dabei ein Strategiepapier auf Grundlage des im Projekt entstandenen Arbeitsplatzes. Dieses Strategiepapier ist dazu gedacht, die Umsetzung des Arbeitsplatzes für Menschen mit Behinderung im Detail zu beleuchten. In diesem Sinne werden die Veränderungen der Beschäftigungssituation für die Beschäftigten, die Wirtschaftlichkeit der Umsetzung, der Ablauf der Implementierung und die Unterschiede zur Implementierung einer klassischen Industrieroboterzelle sowie die sicherheitstechnischen Herausforderungen dargestellt, analysiert und dokumentiert. So ist gewährleistet, dass zukünftige Projekte von den Erfahrungen und Erkenntnissen aus dem vorliegenden Projekt profitieren.
Das LVR-Inklusionsamt ist zuständig für die Teilhabe schwerbehinderter Menschen auf dem allgemeinen Arbeitsmarkt im Rheinland. Es bietet sowohl für Arbeitgeber als auch für schwerbehinderte Menschen unterschiedliche Unterstützungsangebote an und arbeitet mit verschiedenen Partnern zusammen. Die Angebote umfassen beispielsweise finanzielle Förderung zur Schaffung von Arbeits- und Ausbildungsplätzen, zur behinderungsgerechten Einrichtung von Arbeitsplätzen oder bei außergewöhnlichen Belastungen während der Beschäftigung.
Kontakt


