Kategorie: ‘Entwicklung und Konstruktion’
May 7th, 2024 | by
Jansen, Christina
Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
As part of the ErgoFli project, an innovative system is being developed in collaboration with project partners to help tile layers make their work more ergonomic and efficient.
In the video you can see how the system works in the Gazebo simulation environment. The robot automatically removes tiles from a magazine and matches them perfectly to the tiles already laid. With automatic processes, several tiles can be laid in succession to optimize the work process.
Our aim is to create a tool that not only reduces the workload for tilers, but also improves their working environment. We are excited about the progress and look forward to sharing more insights with you soon!
Find out more about the project here.
Contact person:
Mark Witte
Jan Wiartalla
Kategorie: Allgemein, C++, Digital Shadow, Entwicklung und Konstruktion, Lokalisierung, Mobile Robotics, Mobile Robotik, Planung, Prototypenbau, Python, Roboterprogrammierung, ROS, Simulationen, SPS, Virtuelle Inbetriebnahme, Zukunft der Arbeit
No Comments »
April 29th, 2024 | by
Jansen, Christina
As part of the RobWeld project, new wrists and gripping mechanisms were developed for the PARAGRIP developed and built at IGMR.Through iterative design processes using rapid prototyping in 3D printing, we have perfected functionalities, ease of assembly and the manufacturability of components. The result? An elaborate design that combines steel and aluminum components.In the next step, the design can now be extensively tested before it is used on the robot.
You can find more information about the RobWeld project here.
Contact person:
Jan Wiartalla
Kategorie: Allgemein, Entwicklung, Entwicklung und Konstruktion, Greiferentwicklung, Prototypen, Prototypenbau
No Comments »
January 13th, 2023 | by
Jansen, Christina

The Application Dynamics team is made up of members from all IGMR research areas. This allows the skills in vibration analysis and machine dynamics to be optimally combined with the expertise and many years of experience in power transmission and robotics. This fusion of the Institute’s internal research priorities enables solutions to be found to problems that require both technical knowledge of dynamics and application-specific expertise. This cross section of knowledge is applied, for example, in the form of a needs-based investigation and exploitation of the dynamic effects of a system. The focus is on applications in robotics and gearing, but also covers all types of mechanical motion systems. The current research horizon ranges from kinematic redundancy and high-speed trajectories to the use of neural networks to extend the workspace through innovative object manipulation.
Contact: Johannes Bolk
Kategorie: Bahnplanung, Digital Shadow, Entwicklung und Konstruktion, Industrie 4.0, Machbarkeitsstudien, Mobile Robotik, Parameteridentifikation, Planung, Roboterprogrammierung, Robotik, Simulationen, Trajektorie, Zukunft der Arbeit
No Comments »
October 4th, 2022 | by
Jansen, Christina

The aim of the ZIM-funded project “ErgoFli” is to develop an intelligent, semi-automatic tiling aid. Its intuitive user interface, automated handling of tiles and tile adhesive, and intelligent control system are expected to reduce non-ergonomic postures by up to 66%. The ErgoFli can be moved with a motorised drive and uses linear laying kinematics to lay tiles without direct wall contact using the buttering-floating method. Tiles in two formats, 30x60 cm or 60x60 cm, can be laid in a cross bond. The robot is equipped with a tile and tile adhesive reservoir so that it can be used for at least 30 minutes without refilling and can lay 12 m2 per hour while maintaining the required standard flatness tolerances.
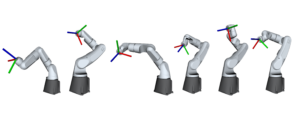
Using a digital twin, an early prototype has already been tested in various scenarios. While the prototype is being designed in standard CAD software, the actual model is being integrated into the Gazebo simulation environment in parallel. This enables continuous integration and testing of control system software packages in application-related scenarios. For example, real test data can be transferred to the digital twin via a closed-loop simulation. The three laser profile sensors of the tile gripper are attached to a prototype gripper and mounted on a UR10 robot arm. The measured values from the sensors can then be transferred to the digital twin in the simulation, despite the different kinematics. In this way, the position control of the gripper can be integrated into the overall system at an early stage by measuring the joint widths.
Contacts:
Jan Wiartalla
Marius Gürtler
Kategorie: Entwicklung und Konstruktion, ROS, Rough Environments, Simulationen, Virtuelle Inbetriebnahme
No Comments »
May 25th, 2022 | by
Jansen, Christina
Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
The video is also available on our YouTube channel.
Contact:
Daniel Gossen
Kategorie: AI Task Planning, Arbeitsraumüberwachung, Aufgabenplanung, Bahnplanung, C++, Data Lake, Design of Experiments, Digital Shadow, Entwicklung und Konstruktion, Greiferentwicklung, Industrie 4.0, Inklusion, Jahresmagazin Automation, KI, KI Aufgabenplanung, KI Objekterkennung, Kollaboration, Lokalisierung, Machbarkeitsstudien, Mobile Robotik, MRK, Parameteridentifikation, PDDL, Planung, Prototypenbau, Python, Reasoning, Regelung, Roboterprogrammierung, Robotik, ROS, ROSPlan, Rough Environments, Sensornetzwerke, Simulationen, SPS, Synthese, Trajektorie, Virtuelle Inbetriebnahme, Zukunft der Arbeit
No Comments »
Am IGMR entwickeln wir performante Kunststoff-Getriebe für den Einsatz in Robotern.

In Zusammenarbeit mit der BAM GmbH arbeiten wir im Rahmen eines ZIM Projekts an der Realisierung und Optimierung eines Cyclo-Getriebes aus Kunststoff. Herausforderungen sind die schlechten Fertigungsgenauigkeiten in der additiven Fertigung und das daraus resultierenden Umkehrspiels und die Drehmomentschwankungen im Getriebe.
Mit einem am IGMR entwickelten Prüfstand sind wir in der Lage die Performance zu analysieren und kontinuierlich zu verbessern. Die Getriebe werden in Zusammenarbeit mit der TU München in einem modularen Robotersystem eingesetzt.
Ansprechpartner:
Markus Schmitz
Kategorie: Design of Experiments, Entwicklung und Konstruktion, Prototypen, Prototypenbau
No Comments »
At IGMR, we have designed an In-House Robot to assist us in the Future with Virtual Renderings and Simulations for Applications and Research Projects.
Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Contact:
Markus Schmitz
Kategorie: Entwicklung und Konstruktion, IGMR, Prototypen, Roboter, Synthese
No Comments »

Das IGMR betreibt seit vielen Jahren eine eigene mechanische Werkstatt zur Fertigung von Prototypen im Bereich von Forschungs- und Entwicklungsprojekten sowie der Lehre.
Zu den Stärken des Teams zählen, die jahrelange Erfahrung der qualifizierten Mitarbeiter im Bereich der Prototypenfertigung und Montage von Baugruppen sowie die anschließende finale Installation und Inbetriebnahme der Versuchseinrichtungen und Prüfstände.
Zudem findet am IGMR innerhalb des Teams eine stetige Kommunikation zwischen der Entwicklung, Konstruktion und Produktion sowie der Integration von Elektro-, Mess- und steuerungstechnischen Komponenten statt. In der Herstellung von robotischen Systemen, Handhabungsgeräten und Bewegungsgeinrichtungen ist eine hochgenaue Fertigung, iterative Arbeitsweise und fachübergreifende Kommunikation von großer Bedeutung. Die Komponenten müssen präzise aufeinander abgestimmt werden und unterliegen einer ständigen Überprüfung innerhalb des Produktentwicklungsprozesses. Neben den herkömmlichen Zerspanungsverfahren wird in unserer Werkstatt das Verfahren des 3D-Drucks (additive Fertigung) angewendet, um je nach Anwendungsfall und Ausführbarkeit ein erstes Funktionsmuster schnell und kostengünstig zu erstellen. Die Anwendung von CAD-Systemen im Bereich der Fertigung ist selbstverständlich.
Fertigungsverfahren:
• Drehen
• Fräsen
• Bohren
• Sägen
• Sandstrahlen
• Schweißen (Elektrode)
• 3D-Druck
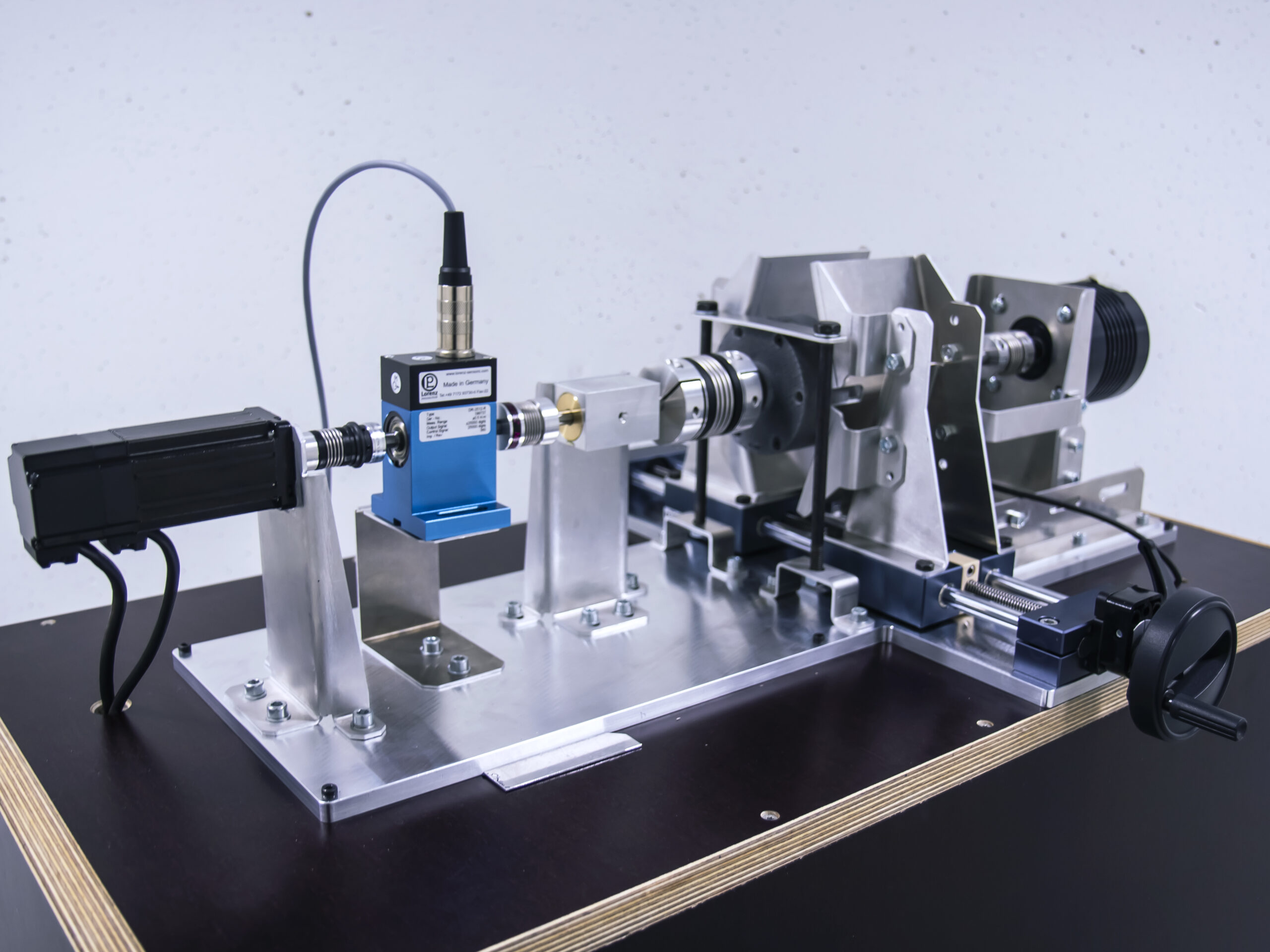
Ein Beispiel der vielfältigen Fertigungsmöglichkeiten der mechanischen Werkstatt in Kombination mit den messtechnischen Kompetenzen des IGMR zeigt die Entwicklung, Konstruktion und Anwendung eines Prüfstands zur Ermittlung der ertragbaren Lastzyklen filigraner, hochgenauer stoffschlüssiger Gelenke.
Im Rahmen des DFG-Projektes „Grundlegende Untersuchung zu stoffschlüssigen
Gelenken mit Einsatz in hochgenauen parallelkinematischen Mikromanipulatoren“ wurde ein Prüfstand zur Ermittlung der ertragbaren Lastzyklen filigraner Kerbgelenke gebaut und Lebensdaueruntersuchung durchgeführt.
Hierbei wurde die Lebensdauer stoffschlüssiger Gelenke untersucht, da diese zwar in der Feinwerktechnik weit verbreitet , aber kaum experimentellen Untersuchungen zur Lebensdauer dieser Gelenke vorhanden sind.
Der Aufbau des Prüfstandes wird in folgendem Video präsentiert:
https://youtu.be/j4ZF_1qZSUk
Besondere Herausforderung bei der Prüfstandsentwicklung waren das reproduzierbare Einsetzen der filigranen Strukturen / stoffschlüssigen Gelenke, die eindeutige Detektion der Gelenkermüdung und die automatisierte Erfassung der Messergebnisse sowie die Berücksichtigung der hohen Lastzyklen aufgrund des Dauerbetriebs.
Links:
Technikum, Labore und mechanische Werkstatt am IGMR
Veröffentlichung zum Prüfstand
Ansprechpartner:
Prof. Hüsing
Sascha Lersch
Judith Merz
Kategorie: Design of Experiments, Entwicklung und Konstruktion, Fertigung, Machbarkeitsstudien, Maschinen, Messtechnik, Prototypen, Prototypenbau, Steuerung, stoffschlüssige Gelenke, Technik, Technik und Verwaltung, Werkstatt
No Comments »