

Schlagwort: ‘Mensch-Roboter-Kollaboration’
IIDEA at the daaap annual meeting 2025 in Koblenz

In March, we were able to take part in this year’s annual meeting at the Rhein-Mosel-Werkstätten in Koblenz as an exhibitor and network member of daaap.
A special highlight: The event was opened by Ms Schall, Minister for Labour, Social Affairs, Transformation and Digitization in Rhineland-Palatinate, among others. She took the time to get to know the IIDEA project and was even able to try out our model workplace for herself.
We are delighted with the interest shown in our project by the participating workshops. The direct exchange, valuable discussions and new contacts show that The vision of inclusive digitalization is shared and carried forward.
Contact person:
Mathias Hüsing
IIDEA CoBot

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
In this video, Prof. Mathias Hüsing of the Institute of Mechanism Theory, Machine Dynamics and Robotics at RWTH Aachen University explains simple teaching options for collaborative robots, or CoBots for short, to support disabled and limited persons at work in the context of human-robot collaboration.
Robotics enables inclusion.
More Information about the IIDEA Project can be found at the project website
IMBA training for the IIDEA project team

Our IIDEA-project team took part in a training course on the “Integration of people with disabilities into the world of work” (IMBA).
IMBA is positioned at the interface of medical and occupational rehabilitation and enables a precise description and comparison of work requirements and human abilities. The training covered the basics of IMBA, with a particular focus on the defined characteristics that serve as the basis for the assessment of work requirements and abilities. A highlight of the training was the introduction to the “Marie Plus” software, which is closely linked to the IMBA concept. The training was conducted by Torsten Alles, Ph.D., Managing Director of iqpr. His extensive knowledge and experience helped to emphasize the importance of IMBA in occupational therapy and activity-based medical rehabilitation.
We are convinced that this training will support our previous research and make a valuable contribution to the IIDEA project. We are grateful for the expertise we have gained through this training and look forward to applying the acquired knowledge in our daily work.
contact person:
Mathias Hüsing
Carlo Weidemann
Elodie Hüsing
Sophie-Charlotte Keunecke
Christina Jansen
Exploration of Automated Capability Estimation for Human-Robot Teaming

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
In our Human-Robot Teaming group, we have a vision that humans and robots will one day be able to work together seamlessly and intuitively in a kind of human-machine symbiosis. Recently, we implemented an exploration application to demonstrate the potential of human-robot teams. The exploration includes a human capability assessment system to evaluate human potential and derive appropriate robot actions.
In the future, robots will be able to use the identified capability deltas to find gaps between human performance and the requirements of the work process. Based on these deltas, actions will be derived that do not take work away from humans, but instead increase human capabilities until the requirements are met. Such systems will enable the human-robot team to reach a state that is similar to what is called “flow”.
contact:
Carlo Weidemann
Project launch IIDEA – Inclusion and integration through cobots on the labor market
In April, the innovative project “IIDEA – Inclusion and integration through cobots in the first labor market” was launched, which aims to empower the inclusion and integration of severely disabled people in the first labor market through collaborative robotics.
The deployment of cobots makes it possible to create new jobs and forms of work that satisfy the individual needs of severely disabled people. These new forms of work are not being established on the margins but at the heart of digitization and Industry 4.0.
In a rapidly changing world, we must focus on the needs of all people and ensure that everyone can reach their full potential. The IIDEA project is an important step towards an inclusive and inclusive society and economy.
For more information about the project, please visit the project profile. If you have any further questions, please feel free to contact our staff: iidea@igmr.rwth-aachen.de.
Contacts:
Prof. Mathias Hüsing
Carlo Weidemann
Sophie-Charlotte Keunecke
Elodie Hüsing
Christina Jansen
Workshop on environmental perception in Sharework
During the training workshop titled ‘Manufacturing Environment Perception for Effective Human-Robot Collaboration,’ we presented topics related to workspace monitoring and object recognition using simple learning methods. The presentation included a brief theoretical introduction to machine learning with random forests, an overview of the IGMR work packages in Sharework, and some tips for using these methods in your own projects. The presentation covered not only our work packages but also the contributions of our partners, particularly in the areas of ontology and motion primitives.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Contact:
Daniel Gossen
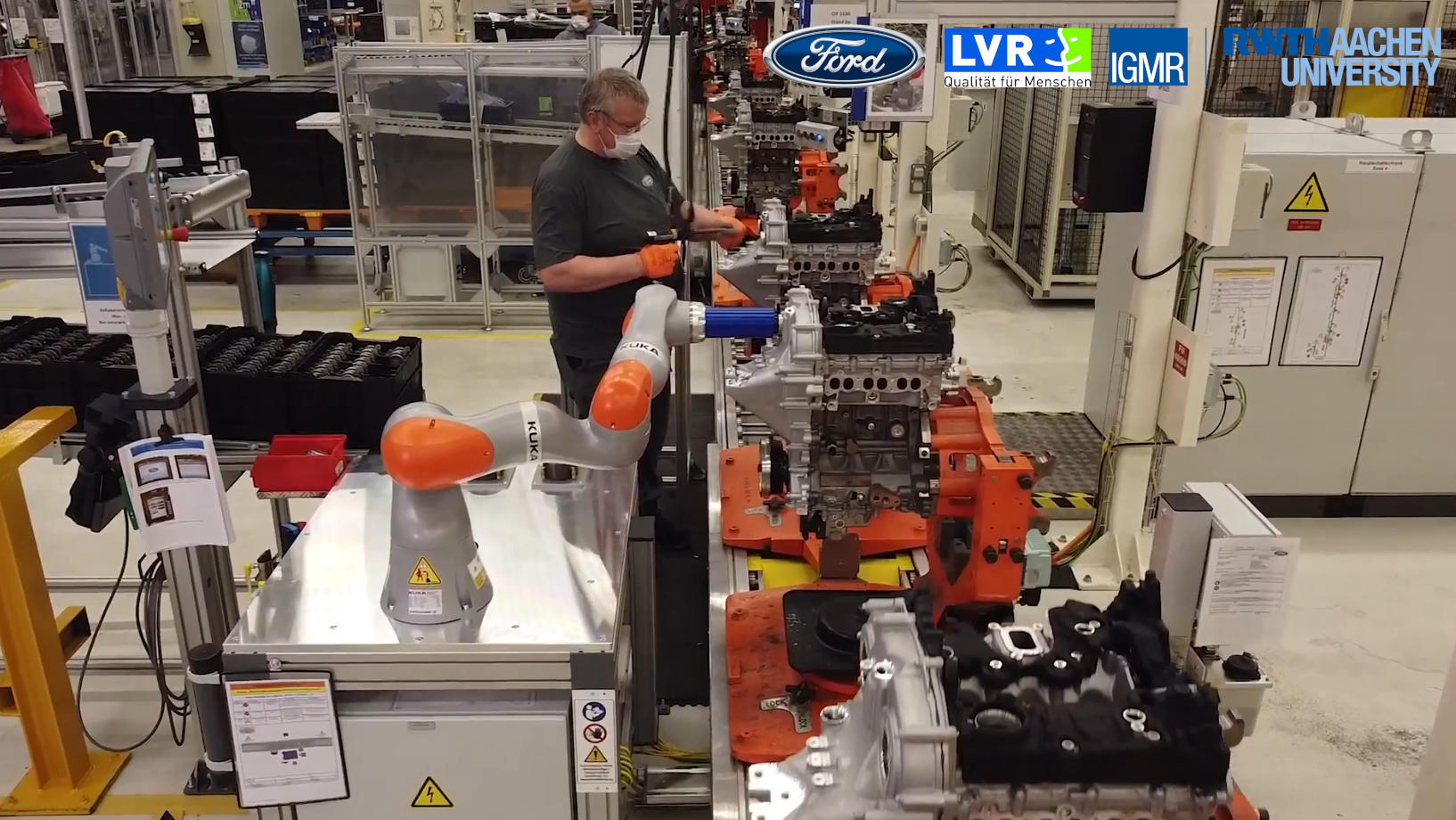
Kollaborierender Roboter bei Ford schafft Jobs für leistungsgewandelte Beschäftige
- Ford richtet mit Hilfe eines kollaborierenden Roboters einen Arbeitsplatz für Beschäftigte mit Schwerbehinderung ein
- Einzigartig ist die enge räumliche Zusammenarbeit zwischen Mensch und Roboter
- Nach ersten Probeläufen reibungslose Zusammenarbeit
- Ford hat zusammen mit der Rheinisch Westfälischen Technischen Hochschule Aachen (RWTH) und dem Landschaftsverband Rheinland (LVR) diesen einmaligen Arbeitsplatz mit einer neuen Version eines kollaborierenden Roboters eingerichtet
AACHEN, 16. August 2021 – Ford hat die Einrichtung eines einzigartigen kollaborierenden Roboters erfolgreich abgeschlossen. Nach rund einem Jahr Forschung, Entwicklung, Mitarbeiterschulung und Trockenläufen arbeitet der so genannte Kobot, ein Wortspiel aus kollaborierend (zusammenarbeitend) und Roboter, nun taktgebunden im Linienfluss im Kölner Motorenwerk des Automobilherstellers. Dort setzt er gemeinsam mit seinem menschlichen Partner VCT-Magnetspulen in einen Öler ein, nimmt die Magnetspulen anschließend auf und presst sie in den Stirndeckel des Motorblocks. Diese Arbeit erfordert große Eindruckkräfte, die selbst für gesunde Arbeitende auf Dauer belastend sein können, und die nun der Kobot für den Menschen übernimmt. Bei den menschlichen Partnern handelt es sich um Beschäftigte mit Schulter- und Handgelenkproblemen. So konnte ein Arbeitsplatz für zwei Beschäftigte mit Schwerbehinderung geschaffen werden.
Ford, die Rheinisch Westfälisch Technische Hochschule in Aachen (RWTH) sowie der Landschaftsverband Rheinland (LVR) forschten rund ein Jahr lang an dieser neuen Einsatzmöglichkeit für einen kollaborierenden Roboter. Das vom LVR mit 372.000 Euro geförderte Modellprojekt hatte das Ziel, den Roboter dergestalt in eine Fertigung einzubauen, dass ein schwerbehinderter Mensch sich einen Arbeitsplatz mit einem Roboter teilt. Das Besondere daran ist die Konfiguration des Roboters, so dass er mit dem Menschen interaktiv „Hand in Hand“ arbeitet und nicht durch eine trennende Schutzeinrichtung, wie z.B. einen Maschinenschutzzaun, getrennt sein muss. Neben der exakten Programmierung des Roboters war auch eine intensive Schulung der Beschäftigten nötig, damit sie einerseits die „Scheu“ vor diesem Kobot ablegen, zum anderen trotzdem noch die nötige Vorsicht walten lassen. Roboter werden seit vielen Jahrzehnten in der Automobilindustrie eingesetzt, allerdings zumeist als überdimensional große Maschinen, die hinter Schutzvorrichtungen arbeiten oder als autonome Fahrroboter, die Materialien transportieren. In diesem Fall bestand die Herausforderung darin, den Arbeitsplatz so zu gestalten, dass sowohl die Voraussetzungen der taktgebundenen Fertigung, die Anforderungen der Arbeitssicherheit als auch die barrierefreie Gestaltung des Arbeitsplatzes berücksichtigt sind.
„Ich bin stolz, dass wir mit diesem Vorzeigeprojekt einen Arbeitsplatz so umgestalten konnten, dass wir ein weiteres Angebot für leistungsgewandelte Beschäftigte haben“, so Dirk Heller, Geschäftsführer Fertigung Ford-Werke GmbH. „Die Akzeptanz unter der Belegschaft ist groß, und besonders die an diesem Arbeitsplatz eingesetzten Mitarbeiter freuen sich auf die neue Aufgabe.“
„Gemeinsam haben wir einen einzigartigen kollaborativen Arbeitsplatz in der Industrie umgesetzt. Ich kenne kaum solch erfolgreich umgesetzte Kollaborationsarbeitsplätze“, erklärt Mathias Hüsing, Professor an der RWTH Aachen. „Warum dieser Mangel? Die menschenzentrierte Arbeitsplatzplanung unter Berücksichtigung von Montageaufgaben, technischen Möglichkeiten und Sicherheitsanforderungen ist (noch) nicht etabliert. Unsere Forschung im Bereich kollaborativer Prozessplanung fokussiert dieses. Inzwischen setzen wir Kollaborationsarbeitsplätze erfolgreich bei anderen Projekten um, wo es darum geht, Arbeitsplätze für Menschen mit Behinderungen auf dem ersten Arbeitsmarkt mit Unterstützung von kollaborierenden Robotern einzurichten.“
„Mit den Mitteln der Ausgleichsabgabe hat das LVR-Inklusionsamt in den letzten Jahren schon auf sehr vielfältige Weise Arbeitsplätze bei Ford umgestalten und sichern können. Das ist eine über die Jahre gewachsene und sehr gute Kooperation zwischen Ford und LVR mit großem Nutzen für die Förderung von Inklusion auf dem Arbeitsmarkt“, ergänzt Christoph Beyer, Leiter des LVR-Inklusionsamtes. „Auch die Erkenntnisse aus dem aktuellen Modellprojekt Kobot helfen uns enorm dabei, die Beschäftigungsmöglichkeit von Menschen mit Behinderung erweitern und neue technische Entwicklungen nutzen zu können. Ford hat hier als großes Unternehmen im Rheinland eine bedeutende Vorbildunktion inne.“
Das Institut für Getriebetechnik, Maschinendynamik und Robotik der RWTH Aachen begleitet das Projekt wissenschaftlich und entwickelt dabei ein Strategiepapier auf Grundlage des im Projekt entstandenen Arbeitsplatzes. Dieses Strategiepapier ist dazu gedacht, die Umsetzung des Arbeitsplatzes für Menschen mit Behinderung im Detail zu beleuchten. In diesem Sinne werden die Veränderungen der Beschäftigungssituation für die Beschäftigten, die Wirtschaftlichkeit der Umsetzung, der Ablauf der Implementierung und die Unterschiede zur Implementierung einer klassischen Industrieroboterzelle sowie die sicherheitstechnischen Herausforderungen dargestellt, analysiert und dokumentiert. So ist gewährleistet, dass zukünftige Projekte von den Erfahrungen und Erkenntnissen aus dem vorliegenden Projekt profitieren.
Das LVR-Inklusionsamt ist zuständig für die Teilhabe schwerbehinderter Menschen auf dem allgemeinen Arbeitsmarkt im Rheinland. Es bietet sowohl für Arbeitgeber als auch für schwerbehinderte Menschen unterschiedliche Unterstützungsangebote an und arbeitet mit verschiedenen Partnern zusammen. Die Angebote umfassen beispielsweise finanzielle Förderung zur Schaffung von Arbeits- und Ausbildungsplätzen, zur behinderungsgerechten Einrichtung von Arbeitsplätzen oder bei außergewöhnlichen Belastungen während der Beschäftigung.
Kontakt
Exercise observation at the Krefeld Fire Brigade


The IGMR is developing methods for predicting the behaviour of firefighters during indoor of the behaviour of firefighters during an interior attack. For an initial parameter study, an exercise observation was carried out during the real fire training of the Krefeld fire brigade. This video documents the sequence of an operation for rescuing people and fighting fires is documented.
We would like to thank the Krefeld fire brigade for their help with this project.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Ansprechpartner:
Digitaltag am 18.06.2021

Am Freitag, den 18.06.2021 nehmen wir im Rahmen des Projektes NextGeneration am Digitaltag der Caritas Köln teil.
Es werden folgende drei Veranstaltungen live, über den Facebook-Kanal der Caritas gestreamt:
DIESE WOCHE FREITAG UM 11:00
Online Live-Veranstaltung: mit dem DigiBus Digitale Teilhabe ermöglichen
DIESE WOCHE FREITAG UM 13:00
Online-Live-Veranstaltung: Roboterlösungen in der inklusiven Arbeit
DIESE WOCHE FREITAG UM 15:00
Online Live-Veranstaltung: VR Brillen in der Altenpflege
Weitere Informationen:
Caritasverband für die Stadt Köln e.V. | Digitaltag (caritas-koeln.de)
Demonstration des lokalen Sicherheitssystems von SHAREWORK
Im EU-Projekt SHAREWORK haben wir kürzlich ein lokales Sicherheitssystem für Mensch-Roboter-Kollaboration fertiggestellt und in betrieb genommen. Wie dieses sich in der Praxis schlägt, zeigt unser Demo-Video.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Ansprechpartner:


