

Schlagwort: ‘ROSPlan’
Integrated AI task planning and screw recognition in a production scenario

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
The video is also available on our YouTube channel.
Contact:
Daniel Gossen
Frohe Weihnachten und frohes neues Jahr!


Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Wir wünschen euch eine schöne Weihnachtszeit und einen guten Rutsch ins neue Jahr! Bleibt gesund 💙 #merrychristmas #happynewyear
Ansprechpartner:
AI task planning in the EU project Sharework
Automated task scheduling used in the EU-Projekt Sharework.
A new IGMR blog entry has been published on the website of the EU-Projekt Sharework. It presents the challenges of task planning for mixed teams of humans and robots, as well as our solution to them. Automated task planning and a modified version of the framework ROSPlan are used for this purpose. You can find more detail in the text and in the linked video of the blog post.
Sharework-Blog:
https://sharework-project.eu/task-planning-coordinates-the-actions-of-mobile-manipulators-such-as-humans-and-robots/
Contact person:
Prof. Mathias Hüsing
AI task scheduling explained
Artificial Intelligence task scheduling explained using an industry scenario.
https://youtu.be/qNDgJc1XUPM
The Automated Task Planning is intended to support the use of robots in flexible environments.
Traditional robot programming as a sub-area of work preparation processes poses great challenges to individual productions with small quantities. Automated Task Planning promises to address the problems.
In the video, in addition to the introduction and classification of Automated Task Planning, the steps required for its implementation and the benefits that result from its use are presented.
The concept was validated during research at IGMR using a simulation, which is used in the examples in the video.
Contact person:
Automatisierte Aufgabenplanung in industriellen Szenarien

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Die automatisierte Aufgabenplanung ist eine übergeordnete Steuerungsstrategie, die in Szenarien mit kollaborierenden Menschen und Robotern verwendet werden kann. Diese Strategie ist dazu nötig, um die Akteure und die auszuführenden Aufgaben zu bestimmen, welche zum Erreichen des Ziels ausgeführt werden müssen.
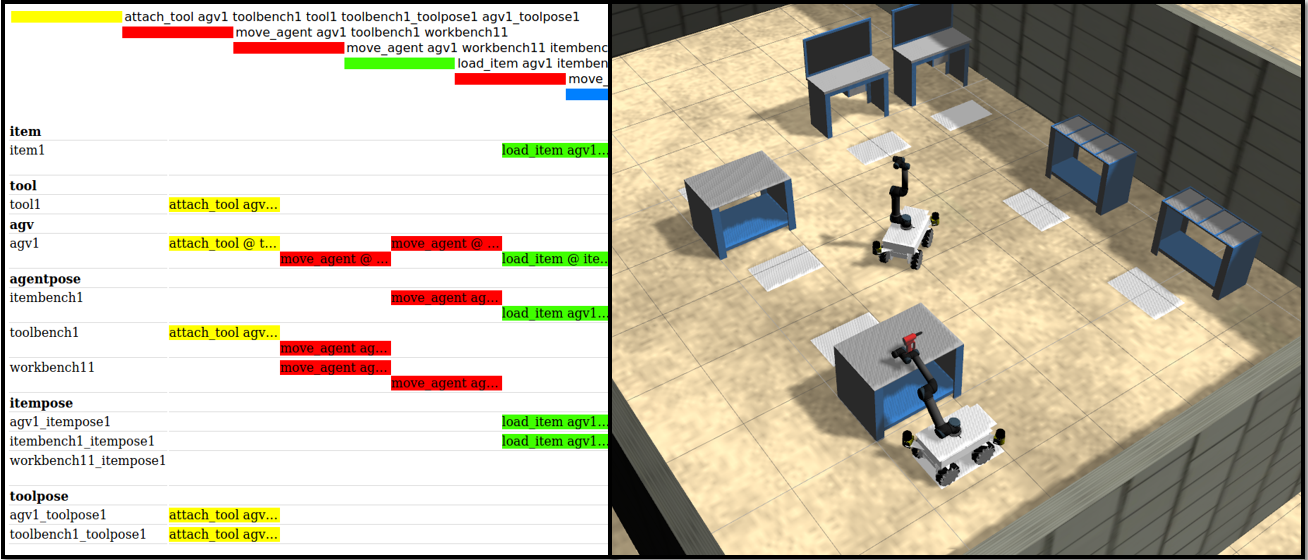
Für das folgende Industrieszenario werden mit dieser Strategie die Aufgaben berechnet, welche durch den Menschen und das FTS, also den beiden Agenten, ausgeführt werden müssen. Am Ende der Ausführung allen geplanten Aktionen sollen alle Gegenstände mit der Handbohrmaschine oder dem Nietwerkzeug bearbeitet wurden.
Die geplanten Aktionen werden zur Ausführung über ein spezielles Framework gesendet, welches in das Robot Operating System (ROS) integriert ist. Jede geplante Aktion wird über so genannte „Action Interfaces“ auf ihre konkrete Ausführung in der Simulation abgebildet. Im industriellen Szenario sind lediglich endliche Zustandsmaschinen als Action Interfaces integriert, wobei deren Zustände Akteur-spezifische Aufrufe an verschiedene ROS-Module darstellen.
Ansprechpartner:
IGMR Seminar: Dr. Michael Cashmore – Plan-Based Robot Control in Real-Time

Mit dem Vortrag von Dr. Miachel Cashmore von der University of Strathclyde startet die virtuelle IGMR Vortragsreihe im Wintersemester 20/21. Wir freuen uns auf einen Einblick in ROSPlan und Plan-Based Robot Control in Real-Time.
Mittwoch, 2. Dezember 2020 16:30 Uhr in Zoom Zoom Meeting Informationen: https://rwth.zoom.us/j/98454895570?pwd=NkpiSWkyaTJtdWlralJrSUtnMDdDZz09 Meeting-ID: 984 5489 5570, Kenncode: 186393
Die Datenschutzhinweise zur Nutzung von Zoom und eine Handreichung für Teilnehmer (Studierende) können von den Seiten des CLS der RWTH Aachen University heruntergeladen werden.
The topic of the seminar will focus on the numerous temporal and numeric challenges that arise in plan execution. If a plan is produced with some flexibility, how it can be executed? In this context the properties of temporal controllability, robustness envelopes, replanning in-situ, and planning concurrently to execution, deliberation in a system of distributed components, in which your actions can affect other parts of a larger system will be discussed.
Die Veranstaltungen im Wintersemester 2020/2021 werden in Zusammenarbeit mit dem VDI-GPP-Arbeitskreis des Bezirksvereins Aachen durchgeführt.
Execution of the planned actions in CoppeliaSim
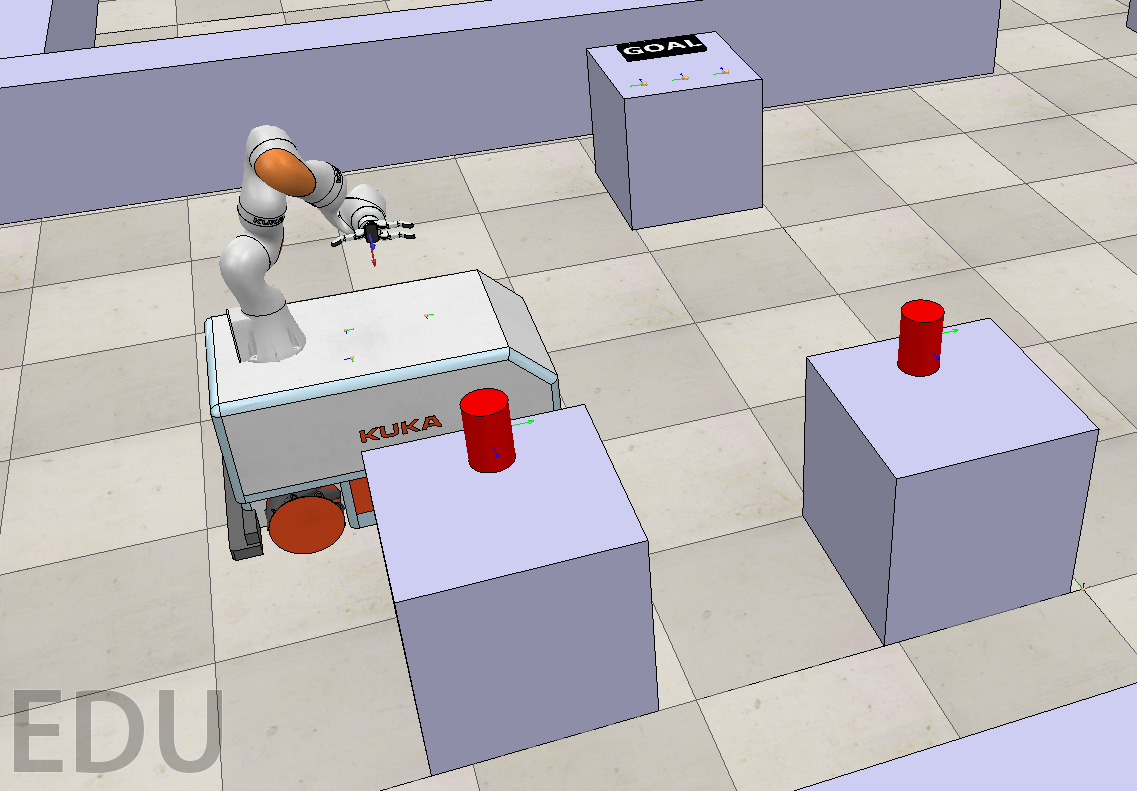
Implementation of ROS Action Interfaces to connect the AI task planning framework ROSPlan with the simulation software CoppeliaSim
Contact person:
Task planning in industrial scenario
PDDL modeling, ROSPlan and Gazebo simulations are used to improve automatic scheduling algorithms for scenarios with collaborating actors.
Contact person:
Realistic simulations in Gazebo
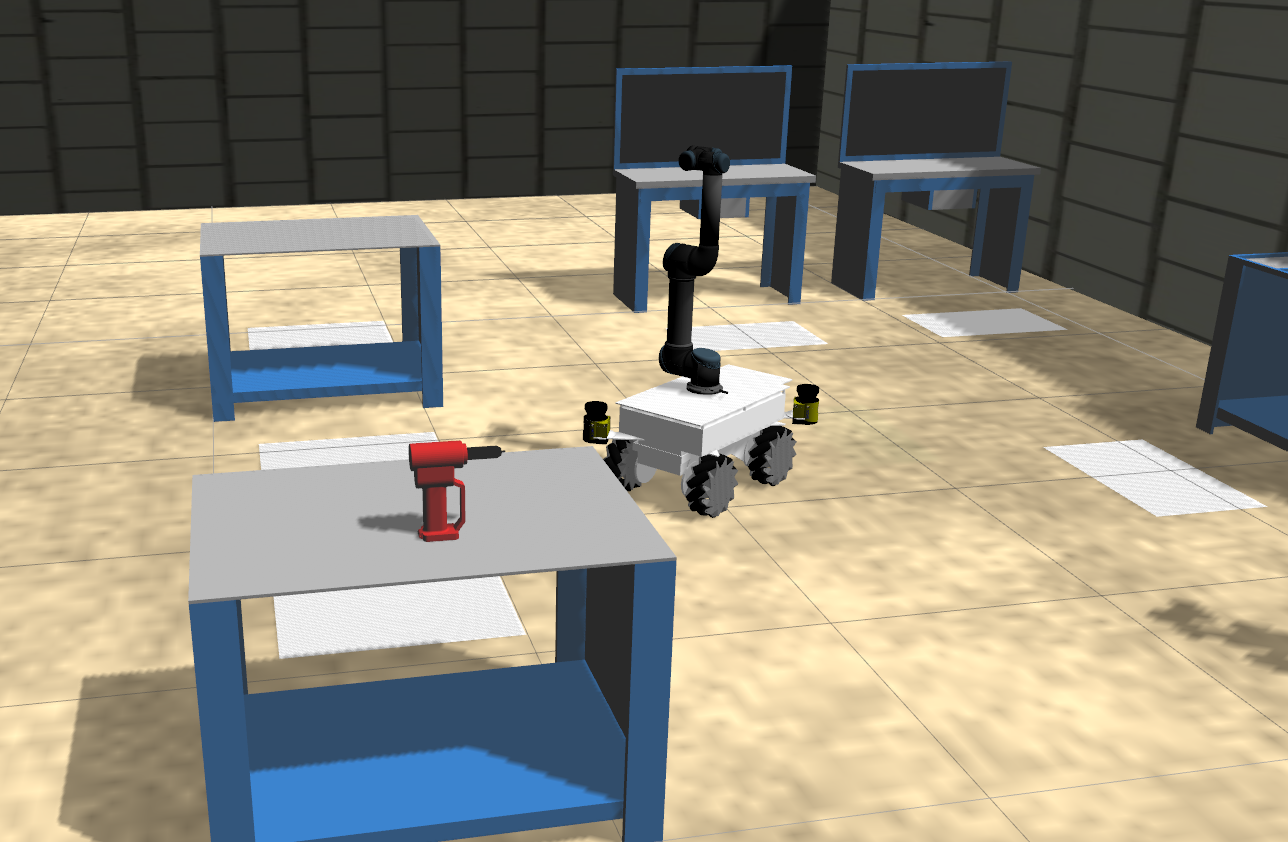
At IGMR we develop complex simulation environments. Textures make them visually more realistic in simulation program Gazebo!
Contact person:


