

Kategorie: ‘Industrie’
Inspiring Guest Lecture by FANUC Germany

We had the great pleasure of welcoming Frank Schwabe from FANUC Europe – Technical Center RO for an exciting guest lecture in our Robotic Systems course. Mr. Schwabe provided our students with an engaging introduction to industrial robotics, presenting FANUC’s technologies, product portfolio, and real-world applications in automation. The students were highly motivated, asked many insightful questions, and gained valuable perspectives on how modern robotics shapes today’s manufacturing environments. A big thank you to Mr. Schwabe and FANUC for their support and for inspiring the next generation of engineers!
Bronze at the German Championship in Robot System Integration

Congratulations to Esteban and Gregory – they took 3rd place at this year’s championship at FANUC in Neuhausen and thus won bronze!
The task: a challenging battery assembly that had to be completed in just three days. The standard was particularly high this year and for the first time eight teams took part.
We are very proud of our two talents! Many thanks to Sophie Charlotte for making this participation possible!
Contact person:
Sophie Charlotte Keunecke
Innovations in textile technology: The DFG project SonicFibre
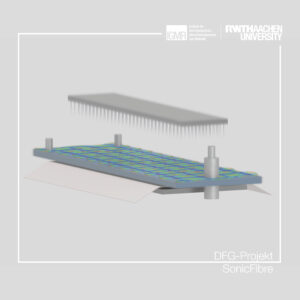
As part of our joint project at the Institute of Applied Mechanics (IAM) and @Institute of Textile Technology (ITA), we are working on an exciting development: the production of nonwovens with optimized efficiency.
💡 The challenge: During needling, a central process step, the fibers are entangled by mechanical movement in order to produce a stable nonwoven from a loose fiber bundle. This creates high frictional forces – a problem that leads to wear on the machine parts.
🔊 Our solution: We optimize the friction between the fibres through the targeted excitation of high-frequency vibrations in the ultrasonic range. Our focus is on stimulating a perforated plate in the ultrasonic range in such a way that a suitable vibration pattern is generated – and thus making the process more efficient and gentle.
You can find more information about the project here.
contact:
Johanens Bolk
Automated robotic dismantling/disassembly – screw detection and removal for electric vehicle recycling
Fully automatic disassembly with precision!
Our new robotic system is revolutionizing the disassembly of electric car batteries. Using the Neura Lara 8 robot and the latest image processing technologies, we recognize screws fully automatically and position the robot precisely to remove them safely.
Thanks to the integration of YOLOv8 and Intel RealSense depth cameras, the system can locate screws in real time and position them optimally on its own. No manual intervention necessary – the system works completely autonomously!
Our goal: to make the recycling process safer, faster and more efficient. Fewer risks for workers and maximizing the recovery of raw materials at the same time. This is the future of the circular economy!
You can find more information about #dimonta here.
contact:
Markus Schmitz
Daniel Gossen
IIDEA CoBot

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
In this video, Prof. Mathias Hüsing of the Institute of Mechanism Theory, Machine Dynamics and Robotics at RWTH Aachen University explains simple teaching options for collaborative robots, or CoBots for short, to support disabled and limited persons at work in the context of human-robot collaboration.
Robotics enables inclusion.
More Information about the IIDEA Project can be found at the project website
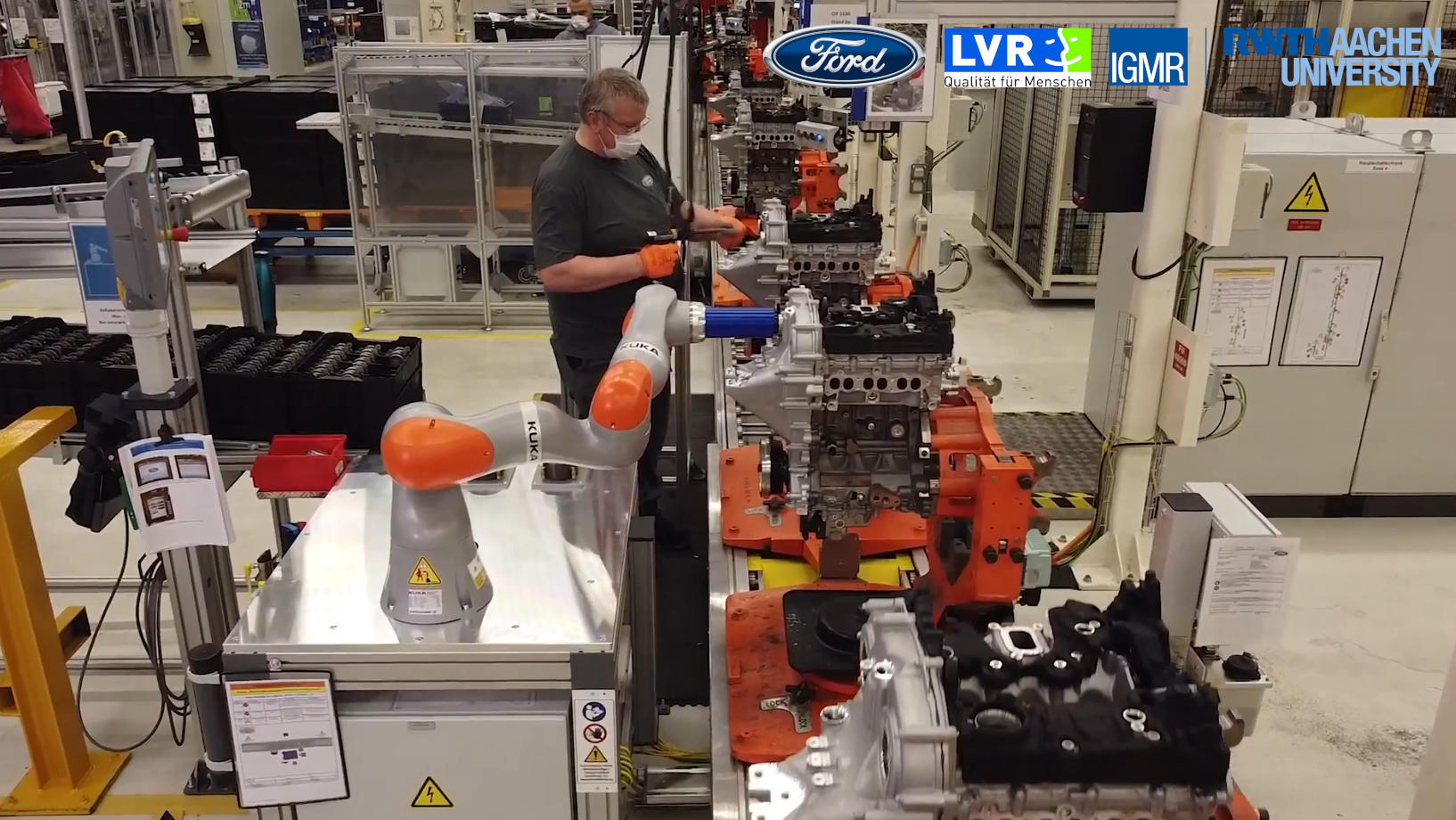
Kollaborierender Roboter bei Ford schafft Jobs für leistungsgewandelte Beschäftige
- Ford richtet mit Hilfe eines kollaborierenden Roboters einen Arbeitsplatz für Beschäftigte mit Schwerbehinderung ein
- Einzigartig ist die enge räumliche Zusammenarbeit zwischen Mensch und Roboter
- Nach ersten Probeläufen reibungslose Zusammenarbeit
- Ford hat zusammen mit der Rheinisch Westfälischen Technischen Hochschule Aachen (RWTH) und dem Landschaftsverband Rheinland (LVR) diesen einmaligen Arbeitsplatz mit einer neuen Version eines kollaborierenden Roboters eingerichtet
AACHEN, 16. August 2021 – Ford hat die Einrichtung eines einzigartigen kollaborierenden Roboters erfolgreich abgeschlossen. Nach rund einem Jahr Forschung, Entwicklung, Mitarbeiterschulung und Trockenläufen arbeitet der so genannte Kobot, ein Wortspiel aus kollaborierend (zusammenarbeitend) und Roboter, nun taktgebunden im Linienfluss im Kölner Motorenwerk des Automobilherstellers. Dort setzt er gemeinsam mit seinem menschlichen Partner VCT-Magnetspulen in einen Öler ein, nimmt die Magnetspulen anschließend auf und presst sie in den Stirndeckel des Motorblocks. Diese Arbeit erfordert große Eindruckkräfte, die selbst für gesunde Arbeitende auf Dauer belastend sein können, und die nun der Kobot für den Menschen übernimmt. Bei den menschlichen Partnern handelt es sich um Beschäftigte mit Schulter- und Handgelenkproblemen. So konnte ein Arbeitsplatz für zwei Beschäftigte mit Schwerbehinderung geschaffen werden.
Ford, die Rheinisch Westfälisch Technische Hochschule in Aachen (RWTH) sowie der Landschaftsverband Rheinland (LVR) forschten rund ein Jahr lang an dieser neuen Einsatzmöglichkeit für einen kollaborierenden Roboter. Das vom LVR mit 372.000 Euro geförderte Modellprojekt hatte das Ziel, den Roboter dergestalt in eine Fertigung einzubauen, dass ein schwerbehinderter Mensch sich einen Arbeitsplatz mit einem Roboter teilt. Das Besondere daran ist die Konfiguration des Roboters, so dass er mit dem Menschen interaktiv „Hand in Hand“ arbeitet und nicht durch eine trennende Schutzeinrichtung, wie z.B. einen Maschinenschutzzaun, getrennt sein muss. Neben der exakten Programmierung des Roboters war auch eine intensive Schulung der Beschäftigten nötig, damit sie einerseits die „Scheu“ vor diesem Kobot ablegen, zum anderen trotzdem noch die nötige Vorsicht walten lassen. Roboter werden seit vielen Jahrzehnten in der Automobilindustrie eingesetzt, allerdings zumeist als überdimensional große Maschinen, die hinter Schutzvorrichtungen arbeiten oder als autonome Fahrroboter, die Materialien transportieren. In diesem Fall bestand die Herausforderung darin, den Arbeitsplatz so zu gestalten, dass sowohl die Voraussetzungen der taktgebundenen Fertigung, die Anforderungen der Arbeitssicherheit als auch die barrierefreie Gestaltung des Arbeitsplatzes berücksichtigt sind.
„Ich bin stolz, dass wir mit diesem Vorzeigeprojekt einen Arbeitsplatz so umgestalten konnten, dass wir ein weiteres Angebot für leistungsgewandelte Beschäftigte haben“, so Dirk Heller, Geschäftsführer Fertigung Ford-Werke GmbH. „Die Akzeptanz unter der Belegschaft ist groß, und besonders die an diesem Arbeitsplatz eingesetzten Mitarbeiter freuen sich auf die neue Aufgabe.“
„Gemeinsam haben wir einen einzigartigen kollaborativen Arbeitsplatz in der Industrie umgesetzt. Ich kenne kaum solch erfolgreich umgesetzte Kollaborationsarbeitsplätze“, erklärt Mathias Hüsing, Professor an der RWTH Aachen. „Warum dieser Mangel? Die menschenzentrierte Arbeitsplatzplanung unter Berücksichtigung von Montageaufgaben, technischen Möglichkeiten und Sicherheitsanforderungen ist (noch) nicht etabliert. Unsere Forschung im Bereich kollaborativer Prozessplanung fokussiert dieses. Inzwischen setzen wir Kollaborationsarbeitsplätze erfolgreich bei anderen Projekten um, wo es darum geht, Arbeitsplätze für Menschen mit Behinderungen auf dem ersten Arbeitsmarkt mit Unterstützung von kollaborierenden Robotern einzurichten.“
„Mit den Mitteln der Ausgleichsabgabe hat das LVR-Inklusionsamt in den letzten Jahren schon auf sehr vielfältige Weise Arbeitsplätze bei Ford umgestalten und sichern können. Das ist eine über die Jahre gewachsene und sehr gute Kooperation zwischen Ford und LVR mit großem Nutzen für die Förderung von Inklusion auf dem Arbeitsmarkt“, ergänzt Christoph Beyer, Leiter des LVR-Inklusionsamtes. „Auch die Erkenntnisse aus dem aktuellen Modellprojekt Kobot helfen uns enorm dabei, die Beschäftigungsmöglichkeit von Menschen mit Behinderung erweitern und neue technische Entwicklungen nutzen zu können. Ford hat hier als großes Unternehmen im Rheinland eine bedeutende Vorbildunktion inne.“
Das Institut für Getriebetechnik, Maschinendynamik und Robotik der RWTH Aachen begleitet das Projekt wissenschaftlich und entwickelt dabei ein Strategiepapier auf Grundlage des im Projekt entstandenen Arbeitsplatzes. Dieses Strategiepapier ist dazu gedacht, die Umsetzung des Arbeitsplatzes für Menschen mit Behinderung im Detail zu beleuchten. In diesem Sinne werden die Veränderungen der Beschäftigungssituation für die Beschäftigten, die Wirtschaftlichkeit der Umsetzung, der Ablauf der Implementierung und die Unterschiede zur Implementierung einer klassischen Industrieroboterzelle sowie die sicherheitstechnischen Herausforderungen dargestellt, analysiert und dokumentiert. So ist gewährleistet, dass zukünftige Projekte von den Erfahrungen und Erkenntnissen aus dem vorliegenden Projekt profitieren.
Das LVR-Inklusionsamt ist zuständig für die Teilhabe schwerbehinderter Menschen auf dem allgemeinen Arbeitsmarkt im Rheinland. Es bietet sowohl für Arbeitgeber als auch für schwerbehinderte Menschen unterschiedliche Unterstützungsangebote an und arbeitet mit verschiedenen Partnern zusammen. Die Angebote umfassen beispielsweise finanzielle Förderung zur Schaffung von Arbeits- und Ausbildungsplätzen, zur behinderungsgerechten Einrichtung von Arbeitsplätzen oder bei außergewöhnlichen Belastungen während der Beschäftigung.
Kontakt
Camera calibration in SHAREWORK
In the EU project SHAREWORK we develop a framework for industry that allows human-robot collaboration even with heavy industrial robots. We are developing camera-based methods for localizing objects in the workspace and deriving process states from them, which in turn can be further used in task planning algorithms.
For the camera network, we set up and calibrated four Stereolabs ZED stereo cameras in our hall. Random, checkerboard, Aruco, as well as ChAruco patterns were used for the calibration. In the end, we have managed to calibrate the cameras to sub-pixel accuracy. In the video, you can see some data from our calibration sets. Currently the data is being processed and we hope to show more in a few weeks.
Watch this video on YouTube: https://youtu.be/8goCBVKaKtU
The content embedded at this point leads you to pages provided by the Google-operated site YouTube – YouTube, LLC, 901 Cherry Ave, San Bruno, CA 94066, USA. By calling up the content, YouTube can determine your IP address and the language of the system, as well as various browser-specific details. If you are logged into your YouTube account, you enable YouTube to assign your surfing behavior directly to your personal profile. You can prevent this by logging out of your YouTube account. YouTube uses cookies and tracking tools. The data processing operations as well as the purposes of the processing can be requested and viewed directly at YouTube.
Project page:
https://www.igmr.rwth-aachen.de/index.php/de/rob/rob-sharework
Contact person:
Industrial project Trapo Loading System

Image source: Pressemitteilung Trapo AG
IGMR – RWTH Aachen supports Trapo AG in the development and integration of trajectory planning and trajectory execution algorithms, environment perception and communication with the PLC for the new Trapo Loading System robot.
Link to the press release of Trapo AG:
https://www.trapo.de/de/presse/artikel/das-tls-3600-entzerrt-die-gefahrenzone-im-be-und-entladebereich/
Contact person:
Stefan Bezrucav
Markus Schmitz


