
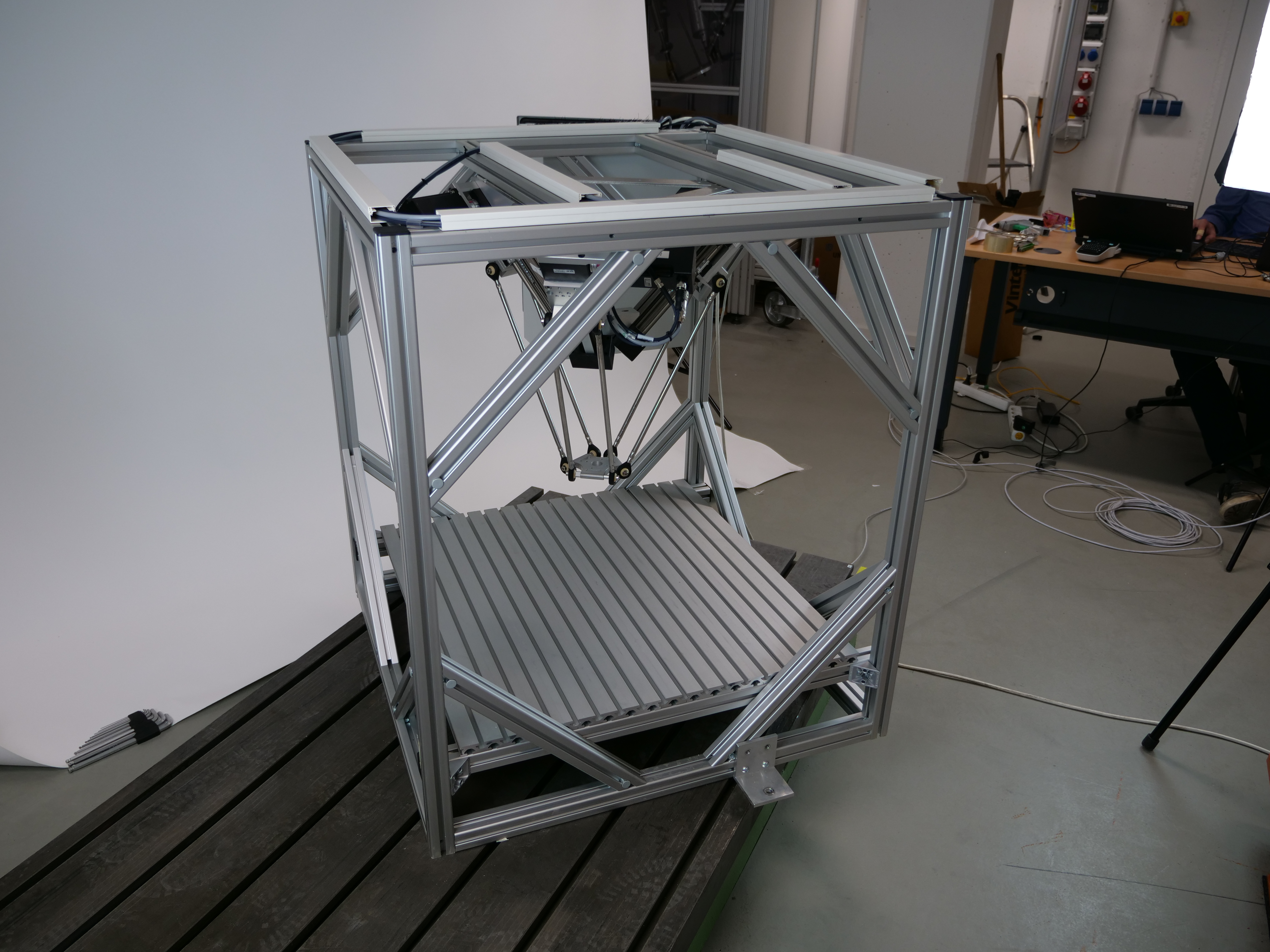
Sebastian Lüke developed a demonstrator including control, trajectory planning and user interface for the igus Delta modular system as part of his master’s thesis.
Contacts:

Sebastian Lüke developed a demonstrator including control, trajectory planning and user interface for the igus Delta modular system as part of his master’s thesis.
Contacts:
Kategorie: Allgemein, Arduino, Delta, GUI, Igus, Mensch-Maschine-Kollaboration, Mensch-Roboter-Kollaboration, SmartRobotics, Touch, Touchoberfläche, Trajektorienplanung
Schlagworte: Arduino, Delta, GUI, Igus, Mensch-Maschine-Kollaboration, Mensch-Roboter-Kollaboration, SmartRobotics, Touch, Touchoberfläche, Trajektorienplanung
Optionen: Antworten ist derzeit nicht möglich | Trackback senden «
Comments are closed.


