

Workshop on environmental perception in Sharework
During the training workshop titled ‘Manufacturing Environment Perception for Effective Human-Robot Collaboration,’ we presented topics related to workspace monitoring and object recognition using simple learning methods. The presentation included a brief theoretical introduction to machine learning with random forests, an overview of the IGMR work packages in Sharework, and some tips for using these methods in your own projects. The presentation covered not only our work packages but also the contributions of our partners, particularly in the areas of ontology and motion primitives.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Contact:
Daniel Gossen
Transformation of workplaces by human-robot collaboration (HRC) at Ford

Since April 2021, employees with disabilities have been working successfully with a collaborative robot at the production line of Ford engine plant in cologne. The robot takes over the unergonomic pressing of the VCT solenoids into the engine cover and the employee installs the screws. During this process, humans and robots work simultaneously in the same workspace. The key findings and results of the project are summarized in the strategy paper.
Further information on the project can be found here.
Contact:
Development of new wrists for the Paragrip
In a joint research project of the IGMR together with the ISF of the RWTH Aachen University, the Multidirectional Additive Manufacturing (MDAM) of metallic components is being researched. In order to optimize the multi-armed. Paragrip robot for this application, student Raphael Hoffmann has developed an innovative concept of a new robotic wrist in his bachelor thesis. The concept enables the welding current to be conducted directly through the wristsm without the need for an additional ground cable attached to the print bed. Moreover, the wrists enable form fitting gripping of the print bed with self-centering to minimize positioning inaccuracies.
You can find the video on our YouTube channel: https://youtu.be/VdT1rjYG4D0
Contact:
Jan Wiartalla
MobiLamas

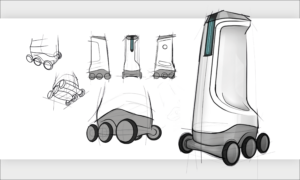
MobiLamas is a concept for free-float charging in the city of the future. In our vision, individual transport will shift from cars to public transport, complemented by so-called last-mile vehicles (e.g., electric bikes or scooters). In such environments, ecological and economical solutions are needed to enable safe and smart charging for a variety of devices. MobiLamas are intelligent mobile robots that interact with last-mile vehicles and charging stations, and safely navigate urban spaces in the presence of pedestrians.
Contact:
IGOR – our in-house robot
Markus Schmitz
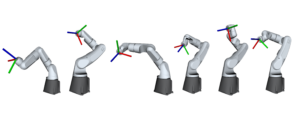
How construction site robots work on a wall
The in-house developed robot has 7 degrees of freedom, which are realized exclusively via revolute joints. Due to the redundancy, the robot can also develop its full performance in narrow situations such as corridors or niches. The video on the left shows a vertical trajectory in which the robot works on a wall from the floor to a height of 2.50m. The video on the right shows the horizontal trajectory of a wall immediately in front of the robot.
More information about this project can be found on the IGMR Website.
Contact person:
Lösungen der Praktischen Übungen in Robotic Systems
Auch in diesem Jahr haben uns wieder kreative Lösungen für Problemstellungen aus dem Modul Robotic Systems erreicht. Die Studierenden konnten erste Erfahrungen bei der Programmierung eines Fanuc Roboters in Roboguide sammeln. Eine Umfangreiche Programmieraufgabe galt es weiterhin an der Fanuc Education Cell zu lösen. Auf Grund der Einschränkungen der Präsenzveranstaltungen mussten alle Lösungen virtuell in Roboguide gelöst werden. Im nächsten Winter wird dann wieder am realen Roboter erprobt.
Ansprechpartner:
Herzlich Willkommen am IGMR!

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Robotic Systems for Service Robotic Applications

Zoom-Link: https://rwth.zoom.us/j/96731705824?pwd=YUtvZEE5enhiRGIzalVEeG9Xa09ldz09
Die Datenschutzhinweise zur Nutzung von Zoom und eine Handreichung für Teilnehmer (Studierende) können von den Seiten des CLS der RWTH Aachen University heruntergeladen werden.
Frohe Weihnachten und frohes neues Jahr!


Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Wir wünschen euch eine schöne Weihnachtszeit und einen guten Rutsch ins neue Jahr! Bleibt gesund 💙 #merrychristmas #happynewyear
Ansprechpartner:


