

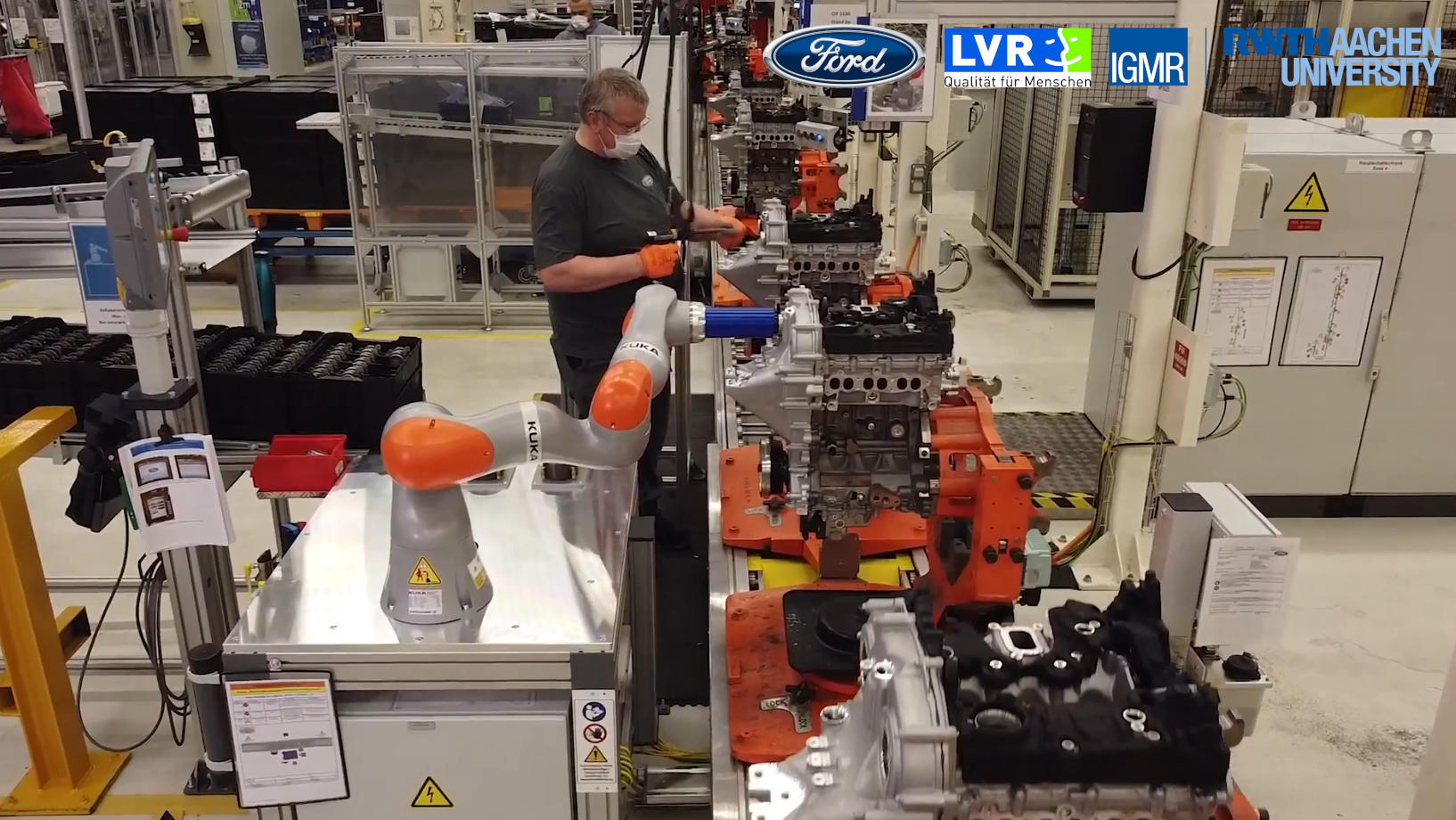
Kollaborierender Roboter bei Ford schafft Jobs für leistungsgewandelte Beschäftige
- Ford richtet mit Hilfe eines kollaborierenden Roboters einen Arbeitsplatz für Beschäftigte mit Schwerbehinderung ein
- Einzigartig ist die enge räumliche Zusammenarbeit zwischen Mensch und Roboter
- Nach ersten Probeläufen reibungslose Zusammenarbeit
- Ford hat zusammen mit der Rheinisch Westfälischen Technischen Hochschule Aachen (RWTH) und dem Landschaftsverband Rheinland (LVR) diesen einmaligen Arbeitsplatz mit einer neuen Version eines kollaborierenden Roboters eingerichtet
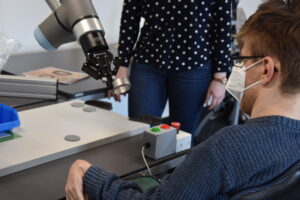
AACHEN, 16. August 2021 – Ford hat die Einrichtung eines einzigartigen kollaborierenden Roboters erfolgreich abgeschlossen. Nach rund einem Jahr Forschung, Entwicklung, Mitarbeiterschulung und Trockenläufen arbeitet der so genannte Kobot, ein Wortspiel aus kollaborierend (zusammenarbeitend) und Roboter, nun taktgebunden im Linienfluss im Kölner Motorenwerk des Automobilherstellers. Dort setzt er gemeinsam mit seinem menschlichen Partner VCT-Magnetspulen in einen Öler ein, nimmt die Magnetspulen anschließend auf und presst sie in den Stirndeckel des Motorblocks. Diese Arbeit erfordert große Eindruckkräfte, die selbst für gesunde Arbeitende auf Dauer belastend sein können, und die nun der Kobot für den Menschen übernimmt. Bei den menschlichen Partnern handelt es sich um Beschäftigte mit Schulter- und Handgelenkproblemen. So konnte ein Arbeitsplatz für zwei Beschäftigte mit Schwerbehinderung geschaffen werden.
Ford, die Rheinisch Westfälisch Technische Hochschule in Aachen (RWTH) sowie der Landschaftsverband Rheinland (LVR) forschten rund ein Jahr lang an dieser neuen Einsatzmöglichkeit für einen kollaborierenden Roboter. Das vom LVR mit 372.000 Euro geförderte Modellprojekt hatte das Ziel, den Roboter dergestalt in eine Fertigung einzubauen, dass ein schwerbehinderter Mensch sich einen Arbeitsplatz mit einem Roboter teilt. Das Besondere daran ist die Konfiguration des Roboters, so dass er mit dem Menschen interaktiv „Hand in Hand“ arbeitet und nicht durch eine trennende Schutzeinrichtung, wie z.B. einen Maschinenschutzzaun, getrennt sein muss. Neben der exakten Programmierung des Roboters war auch eine intensive Schulung der Beschäftigten nötig, damit sie einerseits die „Scheu“ vor diesem Kobot ablegen, zum anderen trotzdem noch die nötige Vorsicht walten lassen. Roboter werden seit vielen Jahrzehnten in der Automobilindustrie eingesetzt, allerdings zumeist als überdimensional große Maschinen, die hinter Schutzvorrichtungen arbeiten oder als autonome Fahrroboter, die Materialien transportieren. In diesem Fall bestand die Herausforderung darin, den Arbeitsplatz so zu gestalten, dass sowohl die Voraussetzungen der taktgebundenen Fertigung, die Anforderungen der Arbeitssicherheit als auch die barrierefreie Gestaltung des Arbeitsplatzes berücksichtigt sind.
„Ich bin stolz, dass wir mit diesem Vorzeigeprojekt einen Arbeitsplatz so umgestalten konnten, dass wir ein weiteres Angebot für leistungsgewandelte Beschäftigte haben“, so Dirk Heller, Geschäftsführer Fertigung Ford-Werke GmbH. „Die Akzeptanz unter der Belegschaft ist groß, und besonders die an diesem Arbeitsplatz eingesetzten Mitarbeiter freuen sich auf die neue Aufgabe.“
„Gemeinsam haben wir einen einzigartigen kollaborativen Arbeitsplatz in der Industrie umgesetzt. Ich kenne kaum solch erfolgreich umgesetzte Kollaborationsarbeitsplätze“, erklärt Mathias Hüsing, Professor an der RWTH Aachen. „Warum dieser Mangel? Die menschenzentrierte Arbeitsplatzplanung unter Berücksichtigung von Montageaufgaben, technischen Möglichkeiten und Sicherheitsanforderungen ist (noch) nicht etabliert. Unsere Forschung im Bereich kollaborativer Prozessplanung fokussiert dieses. Inzwischen setzen wir Kollaborationsarbeitsplätze erfolgreich bei anderen Projekten um, wo es darum geht, Arbeitsplätze für Menschen mit Behinderungen auf dem ersten Arbeitsmarkt mit Unterstützung von kollaborierenden Robotern einzurichten.“
„Mit den Mitteln der Ausgleichsabgabe hat das LVR-Inklusionsamt in den letzten Jahren schon auf sehr vielfältige Weise Arbeitsplätze bei Ford umgestalten und sichern können. Das ist eine über die Jahre gewachsene und sehr gute Kooperation zwischen Ford und LVR mit großem Nutzen für die Förderung von Inklusion auf dem Arbeitsmarkt“, ergänzt Christoph Beyer, Leiter des LVR-Inklusionsamtes. „Auch die Erkenntnisse aus dem aktuellen Modellprojekt Kobot helfen uns enorm dabei, die Beschäftigungsmöglichkeit von Menschen mit Behinderung erweitern und neue technische Entwicklungen nutzen zu können. Ford hat hier als großes Unternehmen im Rheinland eine bedeutende Vorbildunktion inne.“
Das Institut für Getriebetechnik, Maschinendynamik und Robotik der RWTH Aachen begleitet das Projekt wissenschaftlich und entwickelt dabei ein Strategiepapier auf Grundlage des im Projekt entstandenen Arbeitsplatzes. Dieses Strategiepapier ist dazu gedacht, die Umsetzung des Arbeitsplatzes für Menschen mit Behinderung im Detail zu beleuchten. In diesem Sinne werden die Veränderungen der Beschäftigungssituation für die Beschäftigten, die Wirtschaftlichkeit der Umsetzung, der Ablauf der Implementierung und die Unterschiede zur Implementierung einer klassischen Industrieroboterzelle sowie die sicherheitstechnischen Herausforderungen dargestellt, analysiert und dokumentiert. So ist gewährleistet, dass zukünftige Projekte von den Erfahrungen und Erkenntnissen aus dem vorliegenden Projekt profitieren.
Das LVR-Inklusionsamt ist zuständig für die Teilhabe schwerbehinderter Menschen auf dem allgemeinen Arbeitsmarkt im Rheinland. Es bietet sowohl für Arbeitgeber als auch für schwerbehinderte Menschen unterschiedliche Unterstützungsangebote an und arbeitet mit verschiedenen Partnern zusammen. Die Angebote umfassen beispielsweise finanzielle Förderung zur Schaffung von Arbeits- und Ausbildungsplätzen, zur behinderungsgerechten Einrichtung von Arbeitsplätzen oder bei außergewöhnlichen Belastungen während der Beschäftigung.
Kontakt
Exercise observation at the Krefeld Fire Brigade


The IGMR is developing methods for predicting the behaviour of firefighters during indoor of the behaviour of firefighters during an interior attack. For an initial parameter study, an exercise observation was carried out during the real fire training of the Krefeld fire brigade. This video documents the sequence of an operation for rescuing people and fighting fires is documented.
We would like to thank the Krefeld fire brigade for their help with this project.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Ansprechpartner:
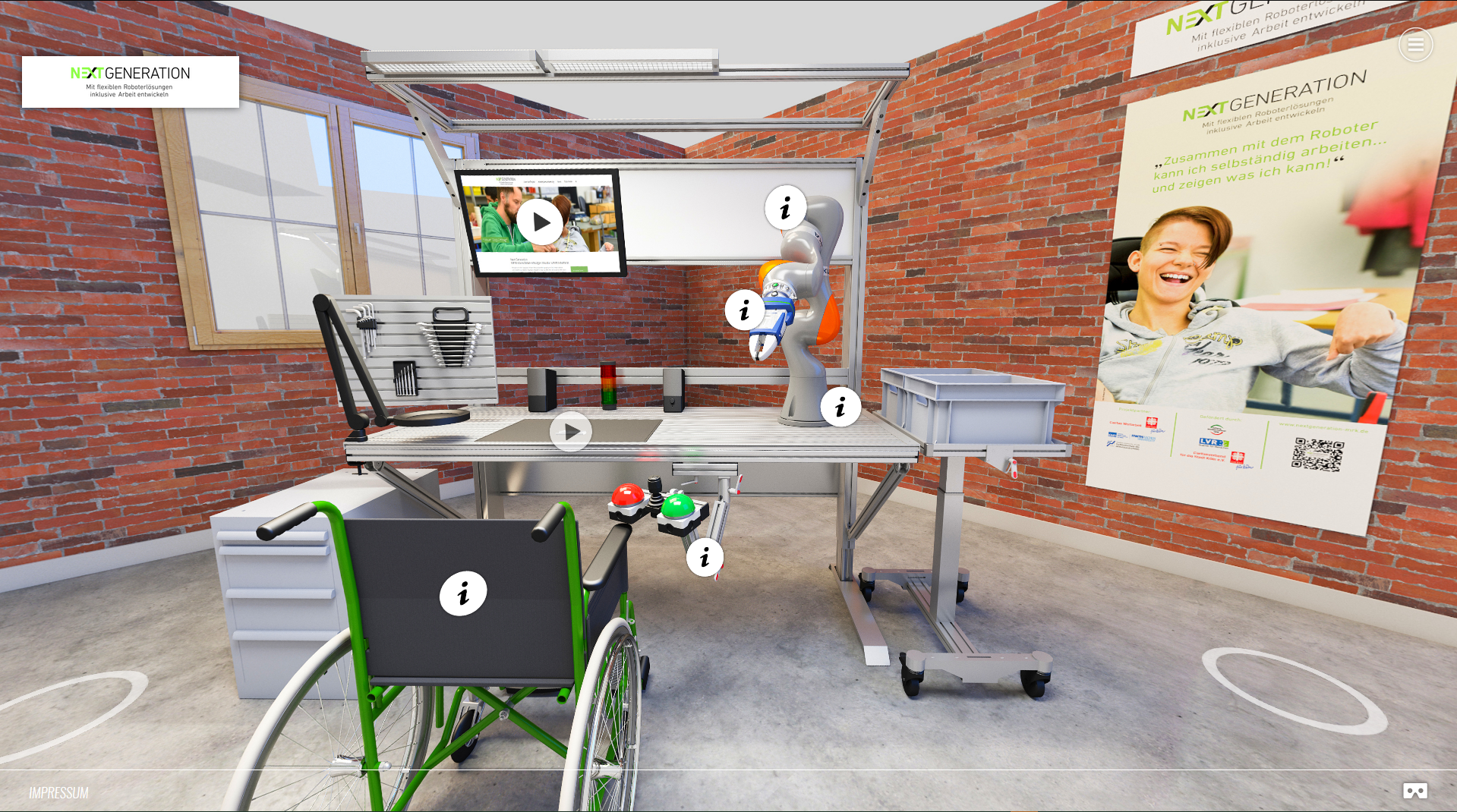
Next Generation: virtueller Messestand zum inklusiven Arbeitsplatz
Research in Germany: Ask a Professor

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
“Many international researchers choose to live and work in Germany. Before coming to Germany, important questions have to be answered. One crucial question is how to find a supervisor, who would guide you through your first steps into research. Watch the recording of our online talk and and grab some useful tipps from German professors on how to find a supervisor in Germany! (https://www.research-in-germany.org)”
More Information:
https://www.research-in-germany.org/en/campaigns-and-activities/online-talks/ask-a-professor.html
Contact:
digitales IGMR Sommerfest & Ehemaligentreffen am 29.07.2021 ab 15:00 Uhr

ReConBot – Ein rekonfigurierbarer Roboter
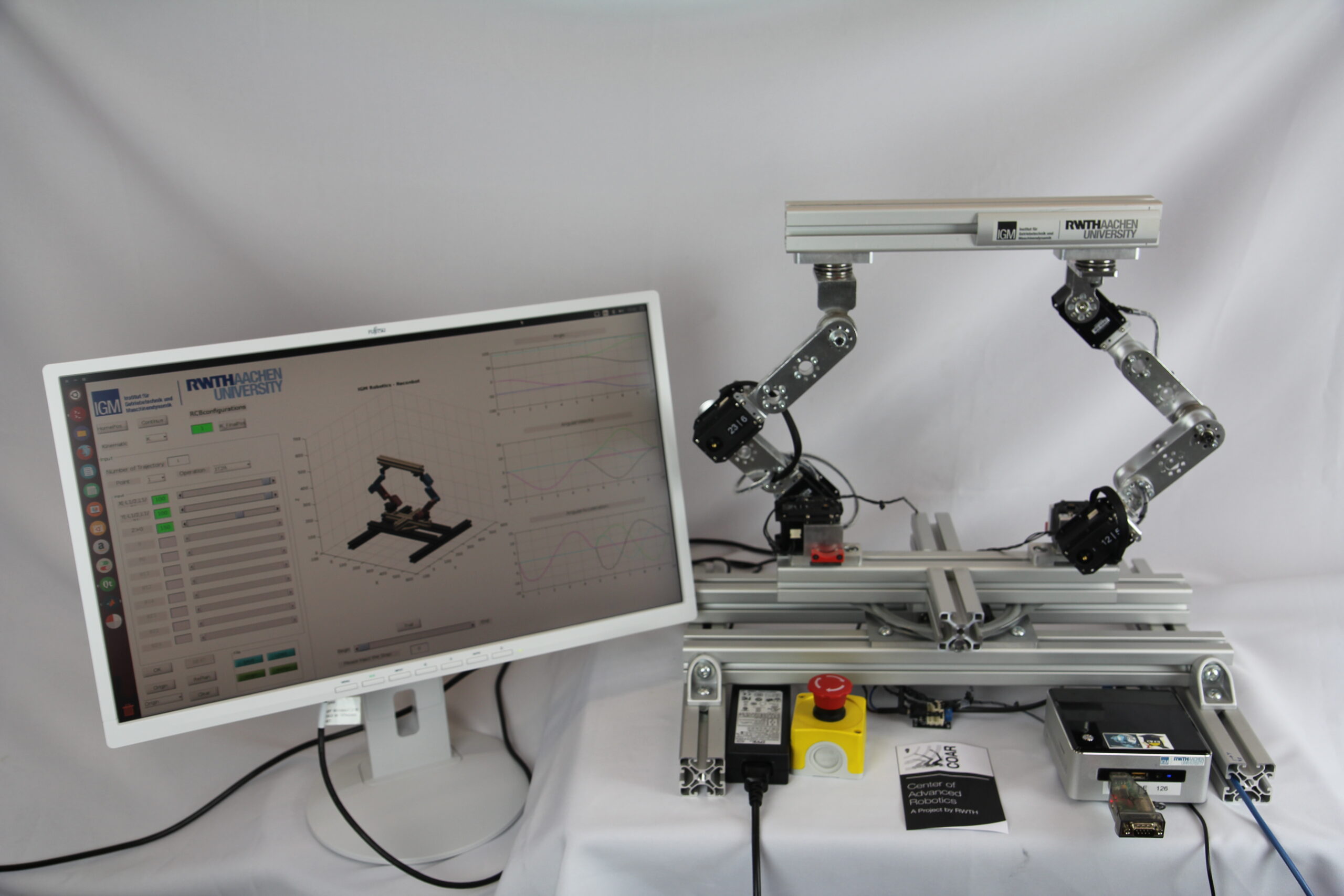
Durch die gezielte Beeinflussung der Roboterstruktur in Form von zusätzlichen Gelenken, können rekonfigurierbare Roboter synthetisiert werden. Diese zeichnen sich über zusätzliche innere Freiheitsgrade aus, welche eine innere Beweglichkeit des Roboters erlauben, ohne eine Posenänderung des Endeffektors zu bewirken. Dies wird häufig bei seriellen Strukturen zur Vermeidung von Kollisionen eingesetzt, wobei sich aber auch parallele Strukturen mit geschlossenen kinematischen Ketten dazu eignen. Am IGMR wurde der ReConBot als parallele Struktur entwickelt, welche durch die kinematische Redundanz auch für einen Strukturwechsel geeignet ist. So ist es möglich unterschiedlichste Konfigurationsräume miteinander zu verbinden und auch die Struktur von einem Vierglied oder Fünfglied zu realisieren, indem sonst aktuierte Gelenke antriebslos geschaltet werden. Der ReConBot zielt auf den hochflexiblen Einsatz in den anspruchsvollen Szenarien des Katastrophenschutz ab.
Ansprechpartner:
IGMR-Seminar 30.06.2021 ab 16:00 Uhr, 3D-EHLA-Verfahren
Im Rahmen des IGMR Seminars wird Herrn Tobias Stittgen von der Firma ponticon GmbH einen Vortrag halten.
Von der Beschichtung bis zur agilen Materialentwicklung: Potenziale und Herausforderungen bei der Anwendung des 3D-EHLA-Verfahrens
Tobias Stittgen, Managing Director, ponticon GmbH
Pulverbasierte DED-Verfahren werden seit vielen Jahren im akademischen Umfeld erforscht und zunehmend in industrielle Anwendungen überführt. Das am Fraunhofer ILT entwickelte Verfahren des Extremen Hochgeschwindigkeits-Laserauftragschweißens (EHLA) setzt hierbei neue Maßstäbe bzgl. erreichbarer Präzision und Aufbauraten. In diesem Vortrag werden die Anwendungsmöglichkeiten und maschinenbaulichen Herausforderungen bei der erstmaligen Umsetzung einer neuen Verfahrensvariante, dem sog. 3D-EHLA, beleuchtet. Dieses bietet zahlreiche Potenziale in der Beschichtung, Reparatur und Additiven Fertigung metallischer Hochleistungs-Bauteile und kann zusätzlich für die agile Entwicklung neuartiger Legierungssysteme eingesetzt werden.
Zoom-Meeting Informationen
30.06.2021, 16:00-17:00
https://rwth.zoom.us/j/96663410367?pwd=SGxhNW5iZ1VxcmtsemlncW1vYk91dz09
Meeting-ID: 966 6341 0367
Kenncode: 927530
Die Datenschutzhinweise zur Nutzung von Zoom und eine Handreichung für Teilnehmer (Studierende) können von den Seiten des CLS der RWTH Aachen University heruntergeladen werden.
Ansprechpartner:
Robotervorstellung im Projekt Next Generation
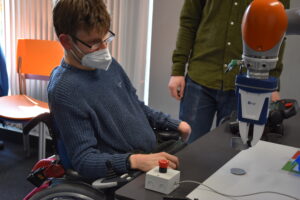
In Köln haben die Teilnehmenden zum ersten Mal die Roboter kennengelernt. Die Begeisterung und Spannung bei allen Beteiligten war groß.
Im Rahmen der Robotervorstellung hatte jeder Teilnehmende eine Stunde Zeit, mit den Roboter in beispielhaften Anwendungen zu arbeiten. Dazu haben wir den KUKA LBR iiwa 7 und den Universal Robot UR10e mit einer unserer Musteranwendungen programmiert, bei denen die Teilnehmenden gute und schlechte Bauteile visuell prüfen mussten. Der Roboter dient dabei als Assistenzmedium und hat den Teilnehmenden die Bauteile angereicht und abgelegt oder gehalten und gedreht, je nachdem ob die Teilnehmenden das Bauteil selber handhaben konnten oder nicht.
In einer dritten Anwendung gab es die Möglichkeit den Kinova Jaco² per Joystick zu steuern und Bauteile zu greifen. Obwohl die Joysticksteuerung großen Anklang fand, muss die Bewegungskoordination noch geübt werden. Mit diesem Ergebnis ist klar, dass für die beiden anderen Roboter auch eine Joystick-Steuerung wünschenswert ist. Angedacht ist darum, den Teilnehmenden die Positionierung und Drehung des Bauteils mit dem Joystick zu ermöglichen, um den visuellen Prüfprozess zu verbessern. Bisher dreht der Roboter das Bauteil in festgelegten Intervallen, bevor eine Eingabe über Taster erfolgen kann.
Ein Video mit weiteren Eindrücken der Robotervorstellung gibt es demnächst hier im Robotik Blog zu sehen.
Weitere Informationen und Bilder zur Robotervorstellung sind auf der Projektwebsite zu finden.
Internetseite des Projektes NextGeneration
Ansprechpartnerinnen und Ansprechpartner
Digitaltag am 18.06.2021

Am Freitag, den 18.06.2021 nehmen wir im Rahmen des Projektes NextGeneration am Digitaltag der Caritas Köln teil.
Es werden folgende drei Veranstaltungen live, über den Facebook-Kanal der Caritas gestreamt:
DIESE WOCHE FREITAG UM 11:00
Online Live-Veranstaltung: mit dem DigiBus Digitale Teilhabe ermöglichen
DIESE WOCHE FREITAG UM 13:00
Online-Live-Veranstaltung: Roboterlösungen in der inklusiven Arbeit
DIESE WOCHE FREITAG UM 15:00
Online Live-Veranstaltung: VR Brillen in der Altenpflege
Weitere Informationen:
Caritasverband für die Stadt Köln e.V. | Digitaltag (caritas-koeln.de)
„Introducing a Modular Framework for Human Tracking with Inhomogeneous Sensor Systems“ at MESROB 2021
The Medical and Service Robotics Conference (MESROB) took place recently. Nils Mandischer presented the “Robot Companion” project and gave an introduction to the tracking process with different inhomogeneous sensor types. The idea behind “Robot Companion“ is to provide robots as companions for firefighters in indoor operations to facilitate operations and reduce risks. You can now watch the presentation here on the blog or on YouTube:

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Ansprechpartner:


