

Schlagwort: ‘Entwicklung und Konstruktion’
Geplanter Umbau des Paragrip

Um für seine neue Aufgabe in der Additiven Fertigung mittels Lichtbogenschweißen (WAAM) optimal gewappnet zu sein, muss der Paragrip einigen konstruktiven Änderungen unterworfen werden.
In einem gemeinsamen Forschungsprojekt des IGMR mit dem ISF der RWTH Aachen wird an der Multidirektionalen Additiven Fertigung (MDAM) metallischer Bauteile geforscht. Durch das Bewegen des Druckbettes mittels eines Manipulators bei gleichzeitig feststehender Schweißpistole kann das zu druckende Bauteil stets so ausgerichtet werden, dass Stützstrukturen vermieden werden können. Um die Bewegung der Druckplatte dabei nicht durch die Kinematik eines seriellen Industrieroboters zu limitieren, soll der am IGMR entwickelte und gebaute Paragrip mit seinem modularen objektintegrativen Handhabungsdesign zum Einsatz kommen. Die Abbildung zeigt ein Rendering des geplanten Umbaus des Paragrips für den Einsatz in der Multidirektionalen Additiven Fertigung mittels Lichtbogenschweißen.
Ansprechpartner:
IGMR Seminar 01. Februar 2021 14:30 Uhr: Veronika Zumpe, Kuka AG
Wir begrüßen Frau Veronika Zumpe von Kuka zum IGMR Seminar. Auch dieser Veranstaltung wird weiterhin virtuell durchgeführt:
How to design a robot. A perspective from corporate research.
For specific handling tasks, there is a need for the development of new robotic systems. It is necessary to develop and design the system with respect to the given task, environment and other constraints. The design process includes finding a suitable kinematic, developing drive concepts for the robot axes, designing the structural parts and finalizing the robot design. For applications with human robot collaboration, more aspects like lightweight design play a significant role and thus should be taken into account. This talk gives a rough overview of the design process of a robot from my corporate research perspective.
Montag, 01. Februar 2021 14:30 Uhr in Zoom
https://rwth.zoom.us/j/98454895570?pwd=NkpiSWkyaTJtdWlralJrSUtnMDdDZz09
Meeting-ID: 984 5489 5570
Kenncode: 186393
Die Datenschutzhinweise zur Nutzung von Zoom und eine Handreichung für Teilnehmer (Studierende) können von den Seiten des CLS der RWTH Aachen University heruntergeladen werden.
Die Veranstaltungen im Wintersemester 2020/2021 werden in Zusammenarbeit mit dem VDI-GPP-Arbeitskreis des Bezirksvereins Aachen durchgeführt.
Ansprechpartner:
IGMR Seminar: Mr. Ramsden – Fanuc Europe

Archivbild
Auch in diesem Jahr begrüßen wir Mr. Ramsden von Fanuc für ein IGMR Seminar. In diesem Jahr wird das Seminar leider virtuell stattfinden.
Zum dritten Mal in diesem Jahr dürfen wir Mr. Ramsden im IGMR Seminar begrüßen. Wie in jedem Jahr ist das Seminar auch als Gastvorlesung in das Modul Robotic Systems an der RWTH eingebunden. Mr. Ramsden wird in zwei Teilen wieder einen spannenden Einblick in Produkte von Fanuc bieten.
Die Veranstaltungen im Wintersemester 2020/2021 werden in Zusammenarbeit mit dem VDI-GPP-Arbeitskreis des Bezirksvereins Aachen durchgeführt.
Seminartermine:
Montag, 14. Dezember 2020 14:30 Uhr per Zoom
Donnerstag, 17. Dezember 2020 16:30 Uhr per Zoom
Zoom Meeting Informationen:
https://rwth.zoom.us/j/98454895570?pwd=NkpiSWkyaTJtdWlralJrSUtnMDdDZz09
Meeting-ID: 984 5489 5570
Kenncode: 186393
Die Datenschutzhinweise zur Nutzung von Zoom und eine Handreichung für Teilnehmer (Studierende) können von den Seiten des CLS der RWTH Aachen University heruntergeladen werden.
Ansprechpartner:
Haptic feedback system RePlaLink
At IGMR, the haptic feedback system RePlaLink (Reconfigurable Planar Linkage) is being developed. With this system, hand-actuated mechanisms can be haptically simulated and interactively synthesized. Furthermore, users can interactively synthesize these mechanisms. This should allow mechanisms with optimal haptic properties to be developed.
People frequently interact with hand-actuated mechanisms in everyday life, e.g., in car doors, furniture doors, reconfigurable furniture, or fitness equipment. Their haptic properties largely determine the perceived quality of these mechanisms. The RePlaLink (Reconfigurable Planar Linkage) aims to support the design and development of these mechanisms by applying haptic feedback systems based on virtual prototypes. The haptic simulation and synthesis method allows users to directly feel mechanisms’ kinematic and kinetostatic properties while operating the system. In addition, users can interactively modify these properties and receive direct haptic feedback. In the first video, the design of the RePlaLink, consisting of a planar five-link with an additional serial link for the handle, is shown.
https://youtu.be/pemrysX4Cr8
The second video shows haptic simulation and synthesis using a kitchen cabinet door as an example.
https://youtu.be/0AqONOv1R5E
Project page:
https://www.igmr.rwth-aachen.de/index.php/de/gt/gt-replalink
Contact:
Mahshid Pour Ebrahimabadi M.Sc.
Next Generation – developing inclusive work with flexible robot solutions
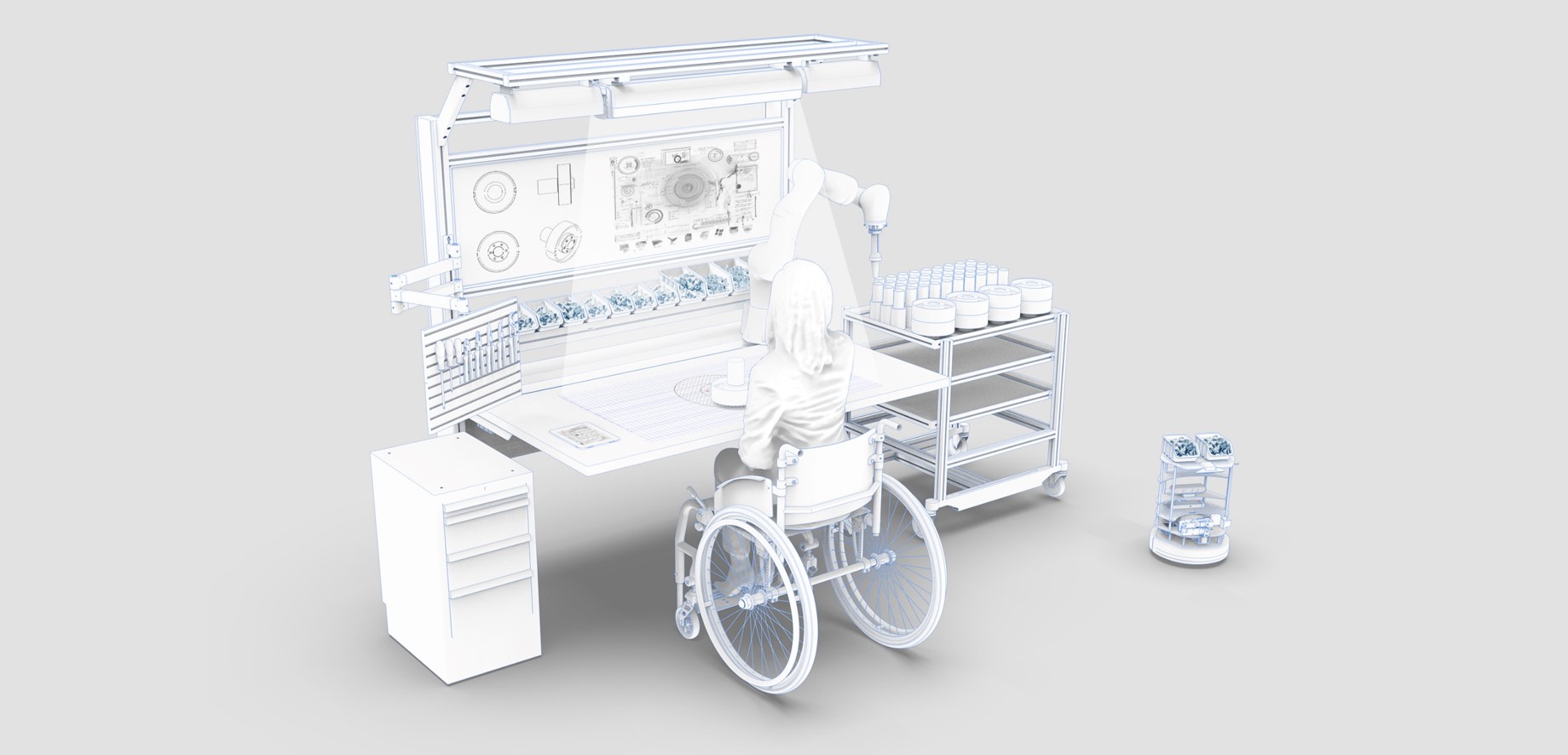
Person sits at a production workplace and is supported by a collaborative robot.
The Next Generation project aims to develop inclusive workplaces with the help of human-robot collaboration (HRC) in order to improve the quality of life.
People with severe and multiple disabilities usually work below their personal cognitive abilities. This causes great dissatisfaction.
For this reason, the project “Next Generation – developing inclusive work with flexible robot solutions” develops workplaces with the aid of human-robot collaboration (HRC).
The project is intended to enable people with disabilities to participate in working life. This can increase the quality of life as well as self-determination and positive personality development.
For tasks from industry, numerous companies from the Cologne area were asked to provide possible sample applications for the conception of the inclusive workplace.
In the process, two activities at Buschhoff Stanztechnik GmbH & Co. KG and at Cölner Hofbräu P. Josef Früh KG were selected. The conception and implementation can now begin. Further up-to-date information is available on the website of the Next Generation project.
Website Next Generation-Project.
Contacts:


