

Kategorie: ‘Bahnplanung’
Collision-free trajectory planning for growing components in robot-assisted manufacturing

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
As part of the FunkDAF research project, the IGMR is working with the MSE and VCI at RWTH Aachen University to explore the limits of additive manufacturing. Our focus is on multidirectional manufacturing: instead of breaking down components into planar layers as in conventional 3D printing, we generate print paths based on stress data to create load-path-compatible and thus more stable structures.
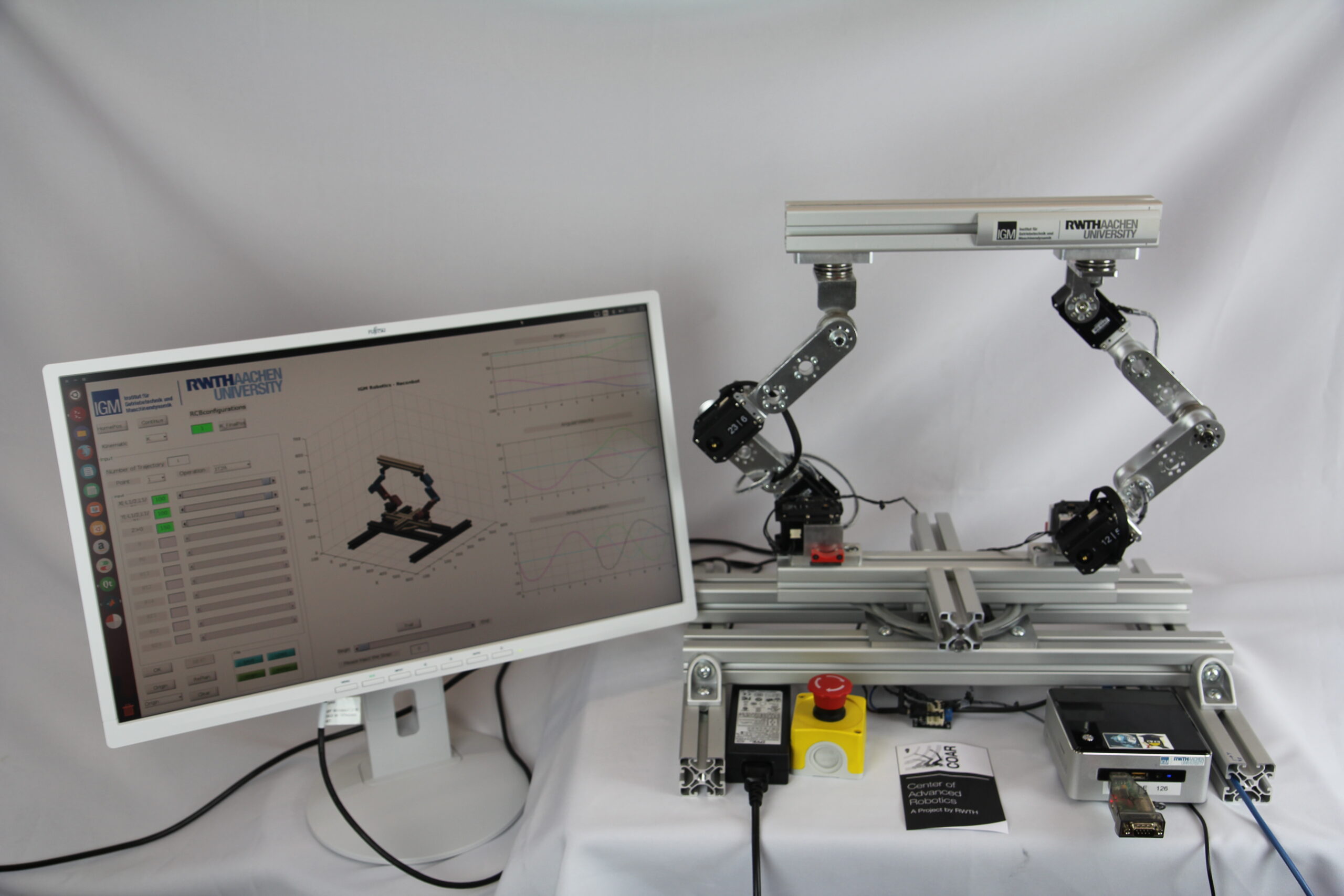
The kinematics: We use a 6-axis industrial robot in a “robot-guided” configuration. The robot guides the print bed and component under a stationary extruder. This use of all six degrees of freedom enables the printing of complex, non-planar geometries and allows component sections to be manufactured in variable orientations to gravity.
The challenge: Trajectory planning for such systems is highly complex. Unlike static print beds, we are moving a dynamically growing workpiece in space. During the process, the component itself becomes a potential collision object with respect to the nozzle and the environment. To make matters more difficult, the extrusion process requires a minimum working distance from the stationary nozzle. Path planning must therefore not only take extrusion into account, but also precisely calculate how the component volume changes.
The travel paths (empty runs) between individual printing segments are particularly critical. Here, the robot often has to completely reorient the component in order to reach the next section without collision. Our current experiments (see images) demonstrate this impressively:
Helix on cylinder: Requires continuous, coordinated rotation to deposit material on a curved surface.
Orthogonal cuboids: Demonstrate the ability to print overhangs without support structures through a 90° reorientation.
Contact person: Mark Witte
Further information about the project can be found here.
Cross section group: Application Dynamics

The Application Dynamics team is made up of members from all IGMR research areas. This allows the skills in vibration analysis and machine dynamics to be optimally combined with the expertise and many years of experience in power transmission and robotics. This fusion of the Institute’s internal research priorities enables solutions to be found to problems that require both technical knowledge of dynamics and application-specific expertise. This cross section of knowledge is applied, for example, in the form of a needs-based investigation and exploitation of the dynamic effects of a system. The focus is on applications in robotics and gearing, but also covers all types of mechanical motion systems. The current research horizon ranges from kinematic redundancy and high-speed trajectories to the use of neural networks to extend the workspace through innovative object manipulation.
Contact: Johannes Bolk
IGOR Tper: The Robot with non-spherical wrist


The next generation of our robot is designed. The new robot is called IGOR Tper. This robot has a non-spherical wrist, that makes the motion planning for the robot rather challenging.
Contact:
Markus Schmitz
Integrated AI task planning and screw recognition in a production scenario

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
The video is also available on our YouTube channel.
Contact:
Daniel Gossen
ReConBot – Ein rekonfigurierbarer Roboter
Durch die gezielte Beeinflussung der Roboterstruktur in Form von zusätzlichen Gelenken, können rekonfigurierbare Roboter synthetisiert werden. Diese zeichnen sich über zusätzliche innere Freiheitsgrade aus, welche eine innere Beweglichkeit des Roboters erlauben, ohne eine Posenänderung des Endeffektors zu bewirken. Dies wird häufig bei seriellen Strukturen zur Vermeidung von Kollisionen eingesetzt, wobei sich aber auch parallele Strukturen mit geschlossenen kinematischen Ketten dazu eignen. Am IGMR wurde der ReConBot als parallele Struktur entwickelt, welche durch die kinematische Redundanz auch für einen Strukturwechsel geeignet ist. So ist es möglich unterschiedlichste Konfigurationsräume miteinander zu verbinden und auch die Struktur von einem Vierglied oder Fünfglied zu realisieren, indem sonst aktuierte Gelenke antriebslos geschaltet werden. Der ReConBot zielt auf den hochflexiblen Einsatz in den anspruchsvollen Szenarien des Katastrophenschutz ab.
Ansprechpartner:
Manipulator-specific path planning for multidirectional additive manufacturing
In a joint research project between the IGMR and the ISF of RWTH Aachen University, research is being conducted on the Multidirectional Additive Manufacturing of metallic components.
With the aid of Multidirectional Additive Manufacturing (MDAM), it is possible to build complex components layer by layer and without the need for support structures. By moving the base plate by means of an industrial robot while the welding gun remains fixed, the component to be printed can always be oriented in such a way that support structures can be avoided. The major challenge lies in the consideration of specialized welding processes with external wire feeding and the use of sensors for process monitoring. This results in a dependency of the orientation of the welding gun compared to the currently printed path.
As part of his master’s thesis, Jan Wiartalla developed a path planning algorithm that calculates an executable and, if possible, continuous path within specified, flat part slices that completely fills the cross-sectional area. This is done robot-specific, so that the algorithm always takes the robot currently in use as well as its limitations into account. A standardized interface allows for the robot model to be easily exchanged and the algorithm can thus quickly be adapted to different test environments. The video illustrates the algorithm’s procedure in a simplified way.
https://youtu.be/chuD57ja9JE
Contacts:
Multidirectional additive manufacturing in arc welding process

In collaboration with the ISF, RWTH Aachen, we at IGMR are researching Multidirectional Additive Manufacturing. In this application for the production of metal components.
Multidirectional Additive Manufacturing enables the production of complex components without support structures, both in the classic FDM process with plastic and with layer-by-layer buildup in the arc welding process. At IGMR, the entire process chain of additive manufacturing is being extended to meet the special challenges of this process from a robotic perspective. This includes the slicing of a virtual component into layers, the subsequent planning of a collision-free structure, the generation of executable robot paths for filling the layers as well as the necessary trajectory planning.
The content embedded at this point takes you to pages provided by the YouTube site operated by Google – YouTube, LLC, 901 Cherry Ave, San Bruno, CA 94066, USA. By calling up the content, YouTube can determine your IP address and the language of the system, as well as various browser-specific details. If you are logged into your YouTube account, you enable YouTube to assign your surfing behavior directly to your personal profile. You can prevent this by logging out of your YouTube account. YouTube uses cookies and tracking tools. The data processing operations as well as the purposes of the processing can be requested and viewed directly at YouTube.
Contact person:
Markus Schmitz
Carlo Weidemann
https://youtu.be/vYejNjBSUp8


