

Kategorie: ‘Mobile Manipulation’
IGMR Konsens im Sensor-Roboter-Netzwerk
Agile, frei vernetzte Montagesysteme zeichnen sich durch die sensorgestützte Kooperation mehrerer mobiler und stationärer Roboter aus. Die dynamische Rekonfiguration von Produktionslinien erfordert jedoch spezielle Steuerungsstrategien für Robotermanipulatoren. Es sollen schnelle und zuverlässige Bewegungsplanungs- und Steuerungsverfahren entwickelt werden, die auf Änderungen der Umgebung und der Sollwerte adäquat reagieren und ausführbare Bewegungen erzeugen. Diese Montagesysteme können dann in der Struktur eines Metamodells abgebildet werden, das zur Erstellung digitaler Schatten der Fabriken der Zukunft führt.
Kontakperson: Daniel Gossen
Das Video auf unserem Yotube Kanal: hier.
MobiLamas

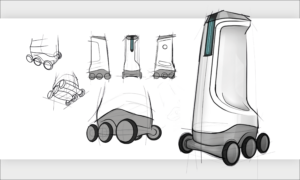
MobiLamas ist ein Konzept für free-float Ladung in der Stadt der Zukunft. In unserer Vision wird sich der Individualverkehr vom Auto auf öffentliche Verkehrsmittel verlagern, die durch sogenannte Last-Mile Fahrzeuge (z. B. Elektrofahrräder oder -roller) ergänzt werden. In solchen Umgebungen sind ökologische und ökonomische Lösungen erforderlich, um sicheres und intelligentes Laden für eine Vielzahl von Geräten zu ermöglichen. MobiLamas sind intelligente mobile Roboter, die mit Last-Mile Fahrzeugen und Ladestationen interagieren und sich in Anwesenheit von Fußgängern sicher im städtischen Raum bewegen.
Ansprechpartner:
Bots2ReC beim ERF2021

Das European Robotics Forum ist das größte Treffen der Robotikexpert*innen in Europa. Unser Projekt Bots2ReC wurde von der Kommission als „Sucess Story“ benannt und wird am Dienstag, den 13.04. in der Session von 15:40 Uhr bis 16:55 Uhr von Prof. Corves vorgestellt. Dabei wird das Entfernen von Asbest aus Wohnhäusern thematisiert und der im Projekt entwickelte teilautomatisierte Prozess inklusive der einzelnen Entwicklungsstufen erläutert. Anhand zahlreicher Videos werden die Herausforderungen bei der Automatisierung der Baubranche aufgezeigt und mögliche Lösungen anhand unserer Prototypen präsentiert. Wir freuen uns sehr über diese Chance, unsere Ergebnisse vor einem so fachkundigen Publikum vorstellen zu dürfen.
Ansprechpartner:
Kooperative mobile Manipulation in Produktionslinien im „Internet of Production“

Anwendungen der mobilen Manipulation in den Arbeitsumgebungen der „Factory of Future“.
Internet of Production (IoP) hat die Vision, die domänenübergreifende Zusammenarbeit in Produktionslinien auf einer neuen Ebene zu ermöglichen. Die Mobilisierung von Roboter-Agenten und Ressourcen sind die Essenzen der Produktionslinien der Fabrik der Zukunft. Um die Roboteragenten in die Lage zu versetzen, auf die Änderung der Produktionslinien zu reagieren, suchen wir im IGMR nach dynamischer Bewegungsplanung und -steuerung der mobilen Manipulatoren.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Weitere Informationen zum Internet of Production:
https://www.igmr.rwth-aachen.de/index.php/de/rob/rob-iop
https://www.iop.rwth-aachen.de
Ansprechpartner:


