

Kategorie: ‘ROS’
Multidirektionale Additive Fertigung im Lichtbogenschweißverfahren

Im Zusammenarbeit mit dem ISF, RWTH Aachen forschen wir am IGMR an der Multidirektionalen Additiven Fertigung. In dieser Anwendung zur Herstellung von Metallbauteilen.
Die Multidirektionale Additive Fertigung ermöglicht sowohl im klassischen FDM-Verfahren mit Kunststoff als auch bei schichtweisen Aufbau im Lichtbogenschweißverfahren die Herstellung von komplexen Bauteilen ohne Stützstrukturen. Am IGMR wird dazu die gesamte Prozesskette der Additiven Fertigung auf die besonderen Herausforderungen dieses Verfahren aus robotischer Sicht erweitert. Dazu gehört die Zerlegung eines virtuellen Bauteils in Schichten (Slicing), die anschließende Planung eines kollisionsfreien Aufbaus, die Generierung von ausführbaren Roboterpfaden zum Ausfüllen der Schichten sowie der notwendigen Trajektorienplanung.
https://youtu.be/vYejNjBSUp8
Ansprechpartner:
Markus Schmitz
Carlo Weidemann
Industrieprojekt Trapo Loading System

Bildquelle: Pressemitteilung Trapo AG
Das IGMR – RWTH Aachen unterstützt die Trapo AG bei der Entwicklung und Integration von Trajektorieplanung- und Trajektorieausführungsalgorithmen, Umgebungwahrnehmung und Kommunikation mit dem PLC für den neuen Trapo Loading System Roboter.
Link zur Pressemeldung der Trapo AG.
Ansprechpartner:
Stefan Bezrucav
Markus Schmitz
SLAM Validierung mittels iGPS

Zur Validierung von Lokalisierungs- und Kartierungsalgorithmen (SLAM) für mobile Roboter verwenden wir am IGMR das indoor Global Positioning System von Nikon.
Die gleichzeitige Erfassung der eigenen Position und die Kartierung der Umgebung ist ein klassisches Problem in der mobilen Robotik und nach wie vor ein aktuelles Forschungsthema. Insbesondere die Steigerung von Genauigkeit, Allgemeingültigkeit und Robustheit sind Ziele aktueller Entwicklungen. Aus diesem Grund validieren wir unsere Algorithmen in der mobilen Robotik mit dem Nikon iGPS, um auch für große Szenarien eine Ground Trouth mit einer Frequenz von 40 Hz und einer Genauigkeit von 0,2 mm nutzen zu können. Auf diese Weise können kritische Ungenauigkeiten und Loop Closure Methoden deutlich besser quantifiziert und analysiert werden.
Projektseite:
Bots2Rec
Ansprechpartner:
Simon Schläger
WAAM-Simulation mit ROS in Gazebo
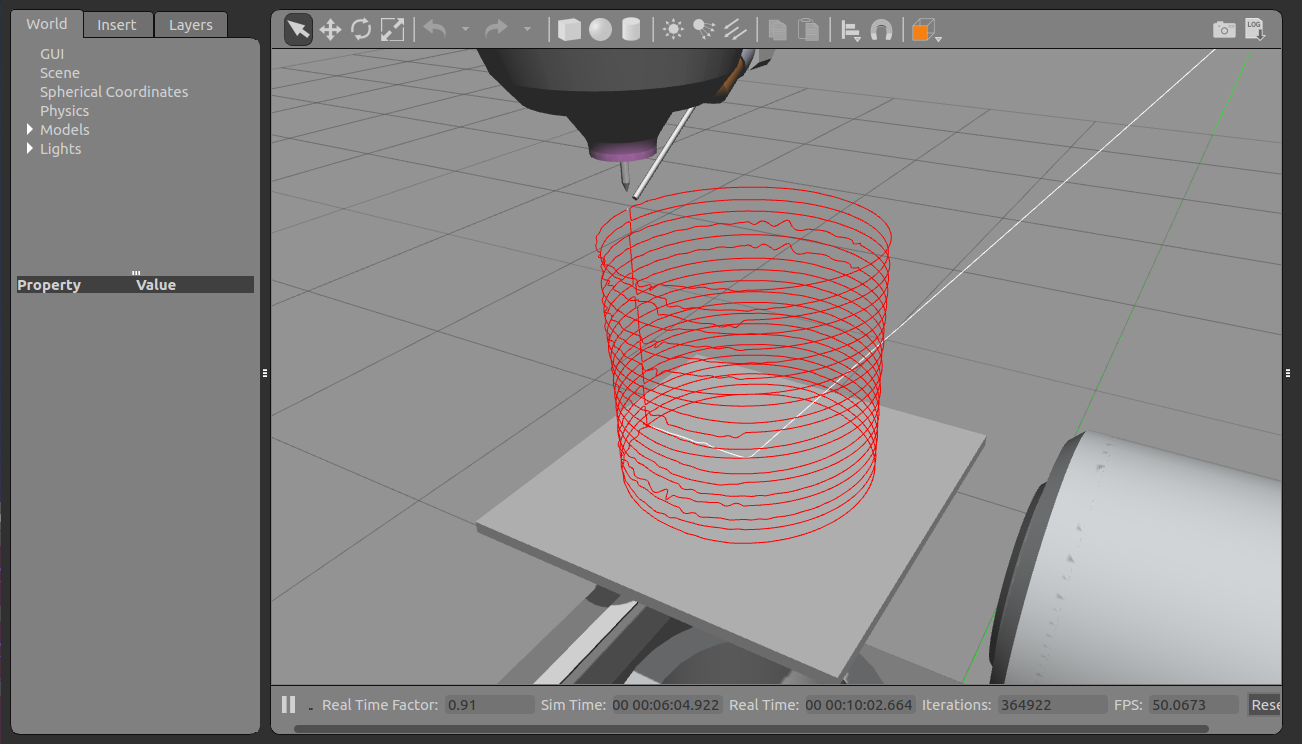
Vincent Brünjes entwarf in seiner Masterarbeit eine Gazebo-Erweiterung, um multidirektionale, additive Wire+Arc-Fertigungsprozesse zu simulieren.
Ansprechpartner:
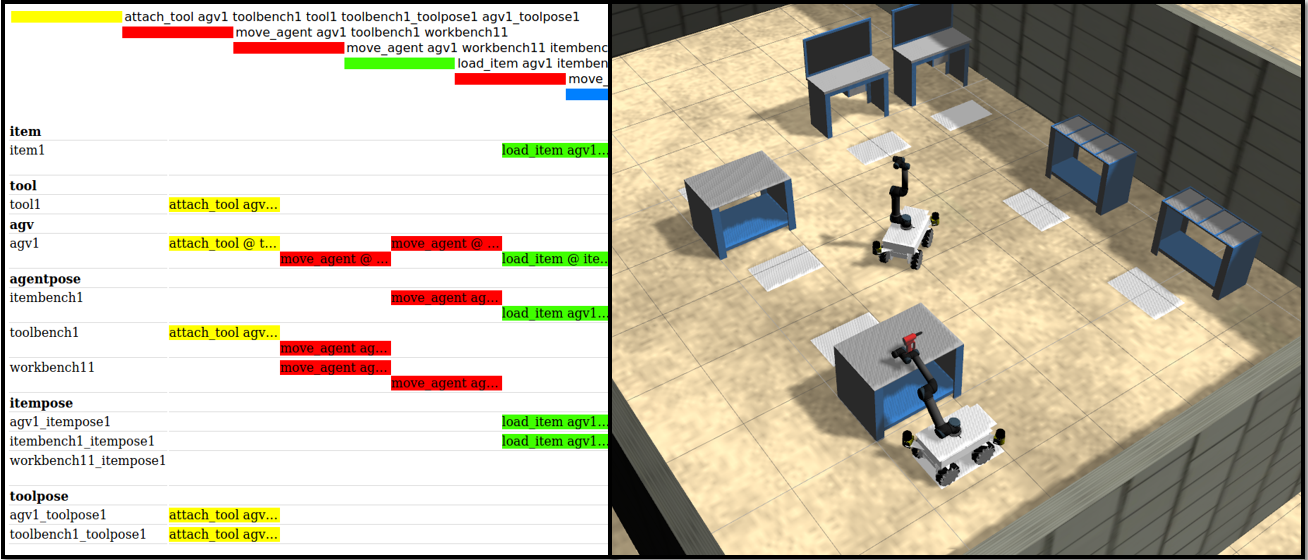
Ausführung der geplanten Aktionen in CoppeliaSim
Implementierung von ROS Action Interfaces zur Verbindung von AI-Aufgabenplanung-Framework ROSPlan mit Simulationssoftware CoppeliaSim
Ansprechpartner:
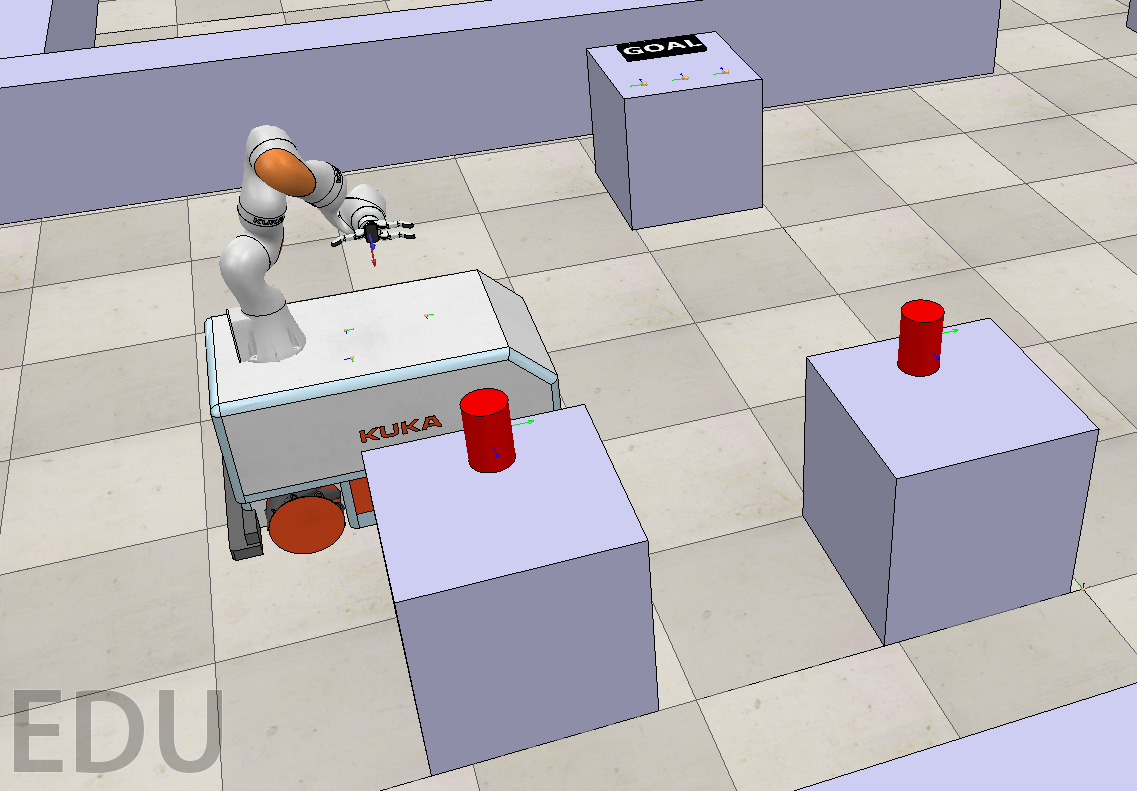
Aufgabenplanung in industriellen Szenario
Zur Verbesserung von automatischen Planungsalgorithmen für Szenarien mit kollaborierenden Akteuren kommen PDDL-Modellierung, ROSPlan und Gazebo-Simulationen zum Einsatz.
Ansprechpartner:
Realistische Simulationen in Gazebo
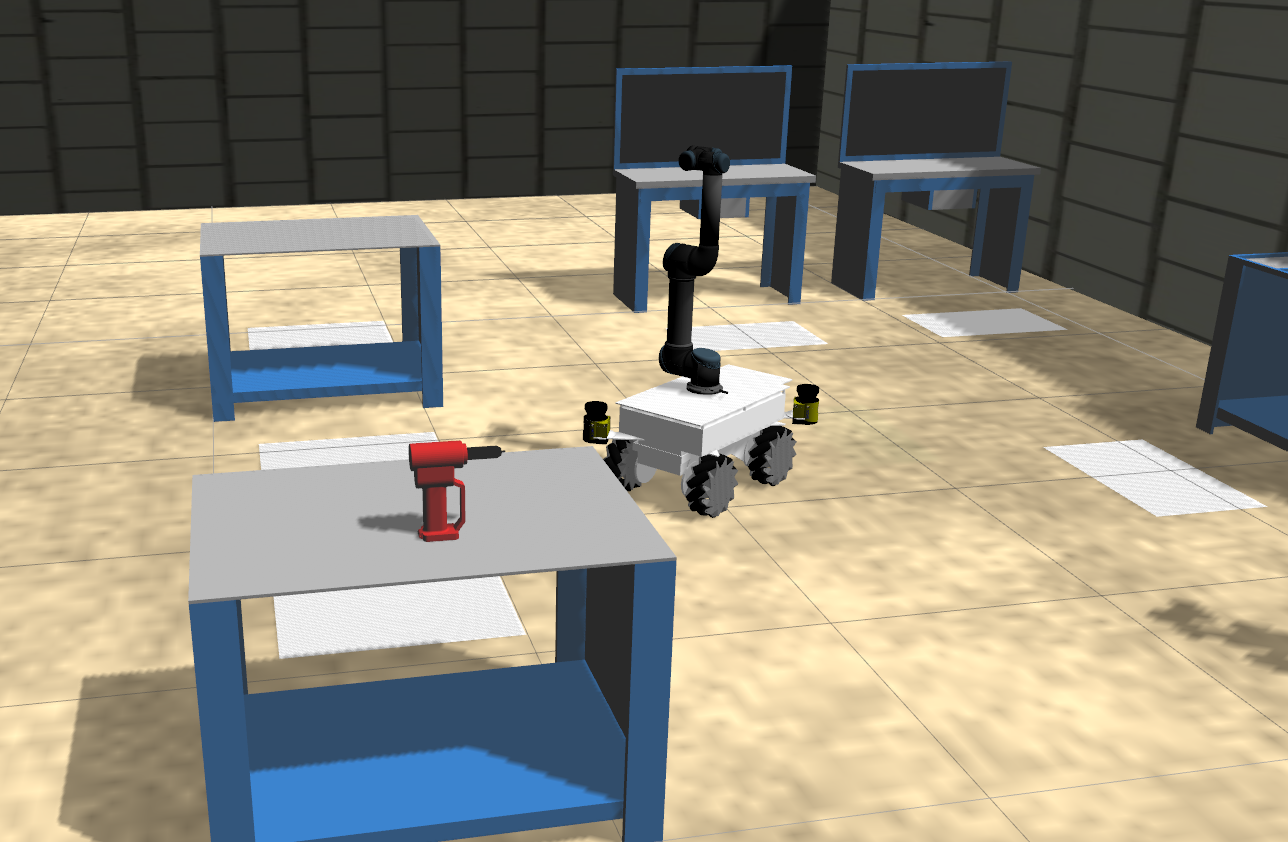
Am IGMR entwickeln wir komplexe Simulationsumgebungen. Texturen machen diese in Simulationsprogramm Gazebo optisch realistischer!
Ansprechpartner:


