

Kategorie: ‘Synthese’
Integrierte AI-Aufgabenplanung und Schraubenerkennung in einem Fertigungsszenario

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Das Video findet ihr auch auf unserem Youtube-Kanal.
Ansprechpartner:
Daniel Gossen
Entwicklung neuer Handgelenke für den Paragrip
In einem gemeinsamen Forschungsprojekt des IGMR mit dem ISF der RWTH Aachen wird an der Multidirektionalen Additiven Fertigung (MDAM) metallischer Bauteile geforscht. Um den mehrarmigen Paragrip-Roboter für diesen Einsatzzweck zu optimieren hat der Student Raphael Hoffmann im Rahmen seiner Bachelorarbeit ein innovatives Konzept neuer Handgelenke erarbeitet. Dieses ermöglicht es, den Schweißstrom ohne ein sonst zusätzlich benötigtes Massekabel direkt über die Handgelenke zu leiten. Darüber hinaus ermöglichen sie ein formschlüssiges Greifen des Druckbettes mit Selbstzentrierung zum Minimieren von Positionierungsungenauigkeiten.
Weitere Informationen zu dem Projekt könnt ihr hier nachlesen.
Das Video dazu findet ihr auf unserem YouTube Kanal: https://youtu.be/VdT1rjYG4D0
Ansprechpartner:
IGOR – unser hauseigener Roboter
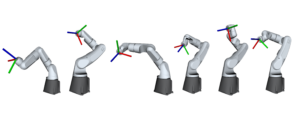
Wir haben das Konzept des hauseigenen Roboters IGOR (https://blog.rwth-aachen.de/robotik/igor-konzept-eines-hauseigenen-6-achs-roboters/) weiter entwickelt. Nun stehen verschiedene Konfigurationen des Roboters mit einer unterschiedlichen Anzahl von Freiheitsgraden zur Verfügung. Jede Konfiguration hat auch eine unterschiedliche Art von Handgelenk und Arm. Alle Modelle sind über Robot Operating System ROS steuerbar.
Ansprechpartner:
IGOR – Konzept eines hauseigenen 6-Achs-Roboters
Am IGMR haben wir einen hauseigenen Roboter entworfen, der uns in Zukunft bei virtuellen Darstellungen und Simulationen für Anträge und Forschungsprojekte unterstützen soll.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Ansprechpartner:


