

Schlagwort: ‘künstliche Intelligenz’
Automatisierte robotische Demontage – Schraubenerkennung und -entfernung für das Recycling von EV-Batterien
Vollautomatische Demontage mit Präzision!
Unser neues robotisches System revolutioniert die Demontage von E-Auto-Batterien. Mithilfe des Neura Lara 8 Roboters und modernster Bildverarbeitungstechnologien erkennen wir Schrauben vollautomatisch und positionieren den Roboter präzise, um sie sicher zu entfernen.
Durch die Integration von YOLOv8 und Intel RealSense Tiefenkameras kann das System Schrauben in Echtzeit lokalisieren und selbstständig die optimale Positionierung vornehmen. Kein manuelles Eingreifen nötig – das System arbeitet komplett autonom!
Unser Ziel: Den Recyclingprozess sicherer, schneller und effizienter zu machen. Weniger Risiken für die Arbeiter und gleichzeitig eine Maximierung der Rohstoffrückgewinnung. Das ist die Zukunft der Kreislaufwirtschaft!
Weitere Informationen zu #dimonta findet ihr hier.
Ansprechpartner:
Markus Schmitz
Daniel Gossen
MobiLamas

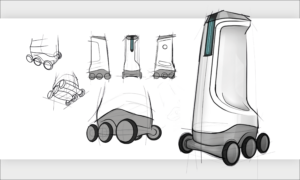
MobiLamas ist ein Konzept für free-float Ladung in der Stadt der Zukunft. In unserer Vision wird sich der Individualverkehr vom Auto auf öffentliche Verkehrsmittel verlagern, die durch sogenannte Last-Mile Fahrzeuge (z. B. Elektrofahrräder oder -roller) ergänzt werden. In solchen Umgebungen sind ökologische und ökonomische Lösungen erforderlich, um sicheres und intelligentes Laden für eine Vielzahl von Geräten zu ermöglichen. MobiLamas sind intelligente mobile Roboter, die mit Last-Mile Fahrzeugen und Ladestationen interagieren und sich in Anwesenheit von Fußgängern sicher im städtischen Raum bewegen.
Ansprechpartner:
IGMR-Seminar 11.05.2021, 16:00 – 17:00 Uhr: Task Planning, Environment Representation and Reasoning in Agricultural and Industrial Robotics
Wir freuen uns Oscar Lima vom DFKI (Deutsches Forschungszentrum für Künstliche Intelligenz) aus Osnabrück als Vortragender beim nächsten Termin der IGMR Vortragsreihe im Sommersemester 21 zu haben. Der Titel seines Vortrags lautet Task Planning, Environment Representation and Reasoning in Agricultural and Industrial Robotics.
The focus of the talk will be on DFKI Osnabrück projects. Most of our work is related to agricultural robotics, perception, environment representation, reasoning and task planning. We start the talk with the concept of precision farming, how robots can assist there, to then look into route planning, environment representation, and some of its applications in navigation and expert systems. At the end of the talk we will finish with projects that are related with industry 4.0 and one which aims to provide a generic tool for AI planning in Europe. The talk is light and conceptual, I hope to catch your attention with interesting and new ideas!
Zoom Meeting Informationen:
11.05.2021, 16:00 – 17:00 Uhr
https://rwth.zoom.us/j/95798557131?pwd=WDNoUmxLV3h4R2JTWVZWMWNSajhNZz09
Meeting-ID: 957 9855 7131
Kenncode: 917617
Die Datenschutzhinweise zur Nutzung von Zoom und eine Handreichung für Teilnehmer (Studierende) können von den Seiten des CLS der RWTH Aachen University heruntergeladen werden.
Die Veranstaltungen werden in Zusammenarbeit mit dem VDI-GPP-Arbeitskreis des Bezirksvereins Aachen durchgeführt.


