

Kategorie: ‘Mensch-Roboter-Kollaboration’
Robotervorstellung im Projekt Next Generation
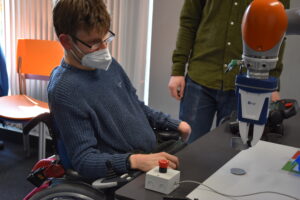
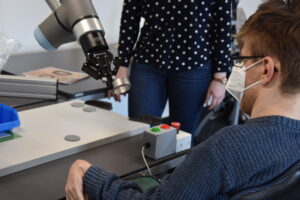
In Köln haben die Teilnehmenden zum ersten Mal die Roboter kennengelernt. Die Begeisterung und Spannung bei allen Beteiligten war groß.
Im Rahmen der Robotervorstellung hatte jeder Teilnehmende eine Stunde Zeit, mit den Roboter in beispielhaften Anwendungen zu arbeiten. Dazu haben wir den KUKA LBR iiwa 7 und den Universal Robot UR10e mit einer unserer Musteranwendungen programmiert, bei denen die Teilnehmenden gute und schlechte Bauteile visuell prüfen mussten. Der Roboter dient dabei als Assistenzmedium und hat den Teilnehmenden die Bauteile angereicht und abgelegt oder gehalten und gedreht, je nachdem ob die Teilnehmenden das Bauteil selber handhaben konnten oder nicht.
In einer dritten Anwendung gab es die Möglichkeit den Kinova Jaco² per Joystick zu steuern und Bauteile zu greifen. Obwohl die Joysticksteuerung großen Anklang fand, muss die Bewegungskoordination noch geübt werden. Mit diesem Ergebnis ist klar, dass für die beiden anderen Roboter auch eine Joystick-Steuerung wünschenswert ist. Angedacht ist darum, den Teilnehmenden die Positionierung und Drehung des Bauteils mit dem Joystick zu ermöglichen, um den visuellen Prüfprozess zu verbessern. Bisher dreht der Roboter das Bauteil in festgelegten Intervallen, bevor eine Eingabe über Taster erfolgen kann.
Ein Video mit weiteren Eindrücken der Robotervorstellung gibt es demnächst hier im Robotik Blog zu sehen.
Weitere Informationen und Bilder zur Robotervorstellung sind auf der Projektwebsite zu finden.
Internetseite des Projektes NextGeneration
Ansprechpartnerinnen und Ansprechpartner
Digitaltag am 18.06.2021

Am Freitag, den 18.06.2021 nehmen wir im Rahmen des Projektes NextGeneration am Digitaltag der Caritas Köln teil.
Es werden folgende drei Veranstaltungen live, über den Facebook-Kanal der Caritas gestreamt:
DIESE WOCHE FREITAG UM 11:00
Online Live-Veranstaltung: mit dem DigiBus Digitale Teilhabe ermöglichen
DIESE WOCHE FREITAG UM 13:00
Online-Live-Veranstaltung: Roboterlösungen in der inklusiven Arbeit
DIESE WOCHE FREITAG UM 15:00
Online Live-Veranstaltung: VR Brillen in der Altenpflege
Weitere Informationen:
Caritasverband für die Stadt Köln e.V. | Digitaltag (caritas-koeln.de)
PeTRA – Einsatz von Mock-Ups bei den Praxispartnern


Das übergeordnete Ziel von PeTRA (Personen-Transfer Roboter-Assistent) ist die Erschaffung einer robotischen Unterstützungslösung in der Patientenlogistik zur Entlastung des Pflegefachpersonals.
Das IGMR übernimmt im Rahmen des Forschungsvorhabens unter anderem die Entwicklung und Inbetriebnahme einer Kopplungseinheit für das Koppeln des Basisfahrzeugs an Rollstühlen mit dem Ziel, diese mitsamt Patienten sicher transportieren zu können.
In der Woche vom 03. bis 06. Mai 2021 fanden erste Anwendungserprobungen des Robotersystems „PeTRA“ bei den jeweiligen Praxispartnern, Universitätsklinikum Augsburg, Barmherzige Brüder München und Martha-Maria Nürnberg, statt. Für die erste Anwendungserprobung in den Krankenhäusern haben wir in Zusammenarbeit mit KUKA ein Mock-Up des Robotersystems „PeTRA“ erstellt. Unter einem Mock-Up wird ein vereinfachtes Modell, verstanden mit welchem die Funktionen und Maße des späteren Demonstrators getestet werden kann. Das Pflegefachpersonal bekam die Möglichkeit das Mock-Up auszutesten und sich gleichzeitig in die Lage eines Patienten zu versetzen. Für die Erläuterung und technische Fragen standen wir und KUKA bereit. Weiterhin wurde das Feedback des Pflegefachpersonals durch Beobachtungen und Interviews seitens KUKA und IREM festgehalten. Das Robotersystem bzw. das Projekt stoß bei dem Pflegefachpersonal aller Praxispartner auf reges Interesse und es konnten um die 50 Interviews geführt werden. Insgesamt hat sich gezeigt, dass wir mit unserem Robotersystem in die richtige Richtung gehen. Wir konnten über die Erprobungen das Pflegefachpersonal weiterführend in den Konstruktionsprozess des Robotersystems bzw. der Koppeleinheit miteinbeziehen.
Weitere Informationen zum Projekt können den Internetseiten des Projektes und des Bundesministeriums für Bildung und Forschung entnommen werden.
Ansprechpartnerinnen:
Demonstration des lokalen Sicherheitssystems von SHAREWORK
Im EU-Projekt SHAREWORK haben wir kürzlich ein lokales Sicherheitssystem für Mensch-Roboter-Kollaboration fertiggestellt und in betrieb genommen. Wie dieses sich in der Praxis schlägt, zeigt unser Demo-Video.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Ansprechpartner:
Neuer kollaborativer Industrieroboterarm: UR10e
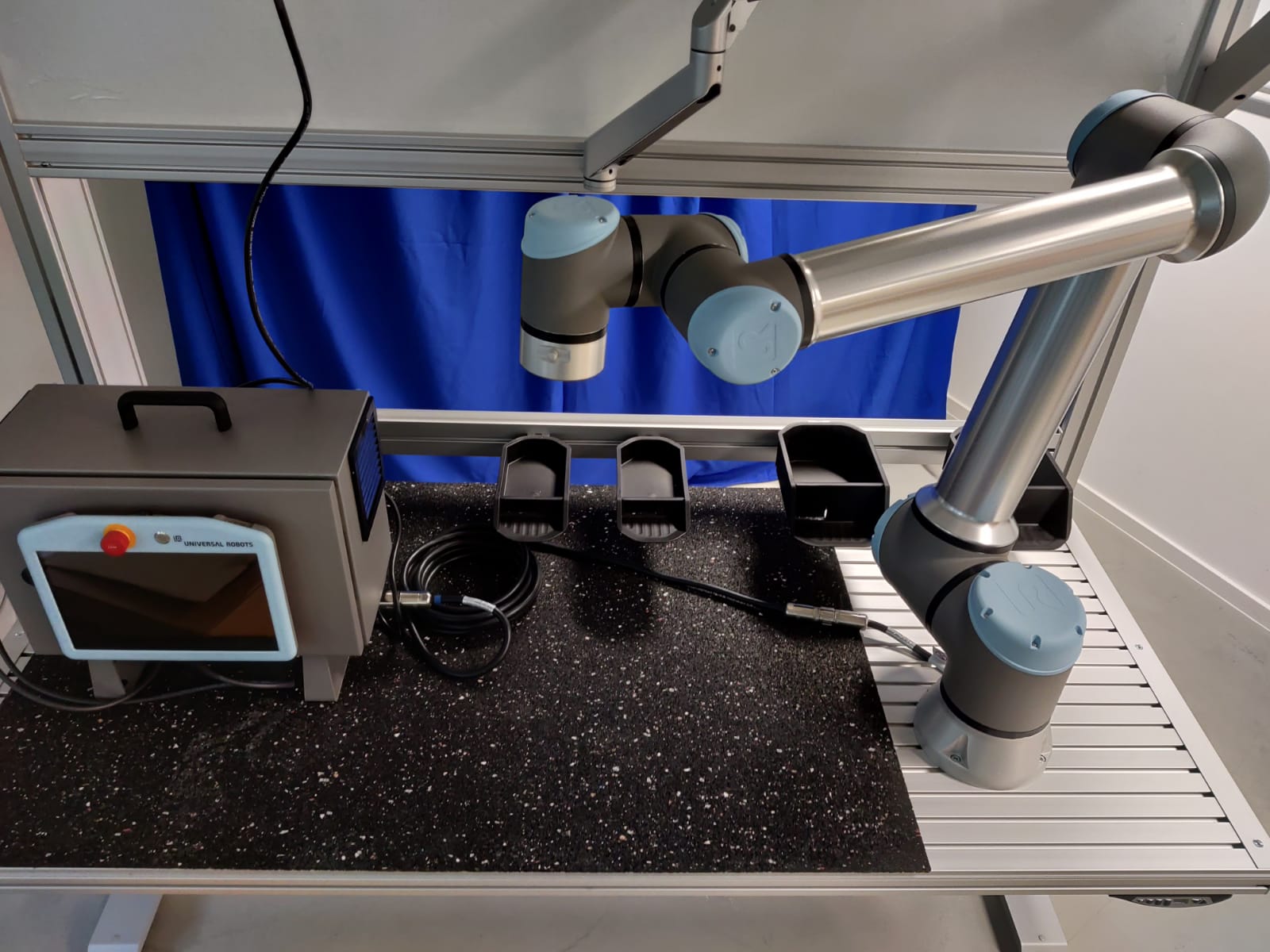
Das IGMR-Kobot-Team vergrößert sich mit der Inbetriebnahme des Universal Robot UR10e.
Das Kobot-Team im Kleinversuchfeld des IGMRs hat durch den Universal Robot UR10e Zuwachs bekommen. Mit einer Reichweite von 1.300 mm und einer Traglast von 10 kg ist er der leistungsstärkste und größte kollaborative Roboter im Team und eignet sich deswegen besonders gut für Pick-and-Place-, Palettierungs-, Verpackungs- und Montageaufgaben. Zudem ist er, einfach zu programmieren und schnell in neuen Anwendungen zu integrieren. Der Roboter wird im Rahmen des Next Generation Projekts eingesetzt und soll hier in Kombination mit einem Bin-Picking-System für das Aufnehmen und Handhaben von ungeordneten Blechbauteilen aus einem Bunker programmiert werden.
Internetseiten:
Ansprechparter:
Kurzfilm zum Projekt Next Generation
Menschen mit einer Schwermehrfachbehinderung in auf dem ersten Arbeitsmarkt integrieren. Ist das überhaupt möglich?
Wie dies mit kollaborativen Robotern möglich wird, zeigt ein Video zum Projekt NextGeneration auf dem Youtube-Kanal der Caritas Köln.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Internetseiten:
Ansprechparter:
Active Collision Avoidance in Human-Robot Collaboration
Against the background of human-robot collaboration, the IGMR at RWTH Aachen University is investigating innovative approaches for the safe design of partially automated assembly and production processes.
Commercially available cobots are usually equipped with speed and distance monitoring or power and force limitation according to ISO/TS 15066. In the event of a hazard situation or collision, corresponding robots therefore react by reducing movement speeds or stopping operation completely, which may adversely affect industrial processes.
The presented approach therefore demonstrates how collisions between humans and robots can be actively avoided. The method uses the kinematic redundancy of the KUKA LBR iiwa to avoid obstacles detected by sensors through the internal reconfiguration of the robot kinematics. The trajectory of the end effector is not changed in the process, so that the specified process sequence is maintained. In this context, alternative safety concepts can be developed to enable collision-free automation in the context of human-robot collaboration.
Active collision avoidance with the KUKA LBR iiwa – reference movement without obstacle avoidance:

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Active collision avoidance with the KUKA LBR iiwa – optimized motion course with obstacle avoidance through kinematic reconfiguration:

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Contacts:
Camera calibration in SHAREWORK – part 2
In october last jear we already showed how to calibrate a camera network. With the calibration target at that time, a calibration accuracy in the sub-pixel range could already be generated. However, at the high distances of about 8 meters and at a resolution of “only” 4MP, this is still several millimeters of deviation in the real world. For our final tests, we reached into the bag of tricks again and got ourselves a larger calibration target. Now, however, the maneuverability is no longer so simple. How such a calibration process looks like with a target of more than 3 square meters, you can see in the video.

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Contacts:
IGMR Seminar 11.02.2021 13:00 Uhr: Wameq Kazemi, Freise Automation GmbH

Bildquelle: Freise Automation GmbH
Wir begrüßen Herrn Wameq Kazemi von Freise Automation GmbH zum IGMR Seminar.
Auch diese Veranstaltung wird weiterhin virtuell durchgeführt:
Im Vortrag wird Herr Kazemi die kollaborative Roboterserie HRC von Hanwha vorstellen und außerdem einen Einblick in die Programmierung der HRC Cobots geben.
Agenda:
o Vorstellung Freise Automation
o Vorstellung HRC Series
o Programmieren des HRC

Der an dieser Stelle eingebundene Inhalt führt Sie auf Seiten, die von der von Google betriebenen Seite YouTube - YouTube, LLC, 901 Cherry Ave., San Bruno, CA 94066, USA - zur Verfügung gestellt werden. Mit dem Aufruf des Inhalts kann YouTube Ihre IP-Adresse und die Sprache des Systems, sowie verschiedene browserspezifische Angaben ermitteln. Wenn Sie in Ihrem YouTube-Account eingeloggt sind, ermöglichen Sie YouTube, Ihr Surfverhalten direkt Ihrem persönlichen Profil zuzuordnen. Dies können Sie verhindern, indem Sie sich aus Ihrem YouTube-Account ausloggen. YouTube verwendet Cookies und Tracking-Tools. Die Datenverarbeitungsvorgänge sowie die Zwecke der Verarbeitung können direkt bei YouTube erfragt und eingesehen werden.
Zugangsdaten zum Online Meeting:
RWTH – Fresie Automation / Kollaborative Robotik
Do., 11. Feb. 2021 13:00 – 14:00 (CET)
Nehmen Sie an meinem Meeting per Computer, Tablet oder Smartphone teil.
https://global.gotomeeting.com/join/111521101
Sie können sich auch über ein Telefon einwählen.
(Bei Geräten, die diese Funktion unterstützen, ist die sofortige Teilnahme über eine der unten aufgeführten Direktwahlnummern möglich.)
Deutschland: +49 721 6059 6510
– Direktwahl: tel:+4972160596510,,111521101#
Zugangscode: 111-521-101
Sie kennen GoToMeeting noch nicht? Installieren Sie jetzt die App, damit Sie für Ihr erstes Meeting bereit sind: https://global.gotomeeting.com/install/111521101
Die Veranstaltungen im Wintersemester 2020/2021 werden in Zusammenarbeit mit dem VDI-GPP-Arbeitskreis des Bezirksvereins Aachen durchgeführt.
Ansprechpartner:
Aufbau der Next Generation Arbeitsplätze

Die Lieferung der Arbeitsplätze ist erfolgt, sodass der Aufbau und die Programmierung beginnen kann.
Kurz vor Weihnachten sind die Arbeitsplätze und das Zubehör beim IGMR der RWTH Aachen angekommen. Somit hat der Aufbau des Arbeitsplatzes begonnen und die Programmierung der Roboter für die Musteranwendungen kann starten.
Dazu sind der KUKA LBR iiwa 7 und der KINOVA JACO2 am Arbeitsplatz befestigt worden und werden für die verschiedenen Greifer (Adaptivgreifer, Parallelgreifer und 2-Finger-Greifer) sowie Bedienelemente konfiguriert. Zusätzlich werden die Roboter für die Musteranwendung der Industrieunternehmen programmiert. Die modulare Programmierung ist dabei essentiell, um die Teilnehmenden entsprechend ihrer Bedürfnisse bestmöglich zu unterstützen.
Im März 2021 werden die Teilnehmenden im Rahmen eines dreitägigen Workshops die Roboter kennenlernen und erproben. Mit den gewonnenen Erkenntnissen aus dem Erstkontakt wird der Arbeitsplatz entsprechend angepasst, damit die Roboter Mitte des Jahres in den Werkstätten der Caritas Wertarbeit Köln zum Einsatz kommen.
Projektseite: https://www.nextgeneration-mrk.de/
Ansprechpartner:


