

Kategorie: ‘ROS’
Multidirectional additive manufacturing in arc welding process

In collaboration with the ISF, RWTH Aachen, we at IGMR are researching Multidirectional Additive Manufacturing. In this application for the production of metal components.
Multidirectional Additive Manufacturing enables the production of complex components without support structures, both in the classic FDM process with plastic and with layer-by-layer buildup in the arc welding process. At IGMR, the entire process chain of additive manufacturing is being extended to meet the special challenges of this process from a robotic perspective. This includes the slicing of a virtual component into layers, the subsequent planning of a collision-free structure, the generation of executable robot paths for filling the layers as well as the necessary trajectory planning.
The content embedded at this point takes you to pages provided by the YouTube site operated by Google – YouTube, LLC, 901 Cherry Ave, San Bruno, CA 94066, USA. By calling up the content, YouTube can determine your IP address and the language of the system, as well as various browser-specific details. If you are logged into your YouTube account, you enable YouTube to assign your surfing behavior directly to your personal profile. You can prevent this by logging out of your YouTube account. YouTube uses cookies and tracking tools. The data processing operations as well as the purposes of the processing can be requested and viewed directly at YouTube.
Contact person:
Markus Schmitz
Carlo Weidemann
https://youtu.be/vYejNjBSUp8
Industrial project Trapo Loading System

Image source: Pressemitteilung Trapo AG
IGMR – RWTH Aachen supports Trapo AG in the development and integration of trajectory planning and trajectory execution algorithms, environment perception and communication with the PLC for the new Trapo Loading System robot.
Link to the press release of Trapo AG:
https://www.trapo.de/de/presse/artikel/das-tls-3600-entzerrt-die-gefahrenzone-im-be-und-entladebereich/
Contact person:
Stefan Bezrucav
Markus Schmitz
SLAM validation using iGPS

For the validation of localization and mapping algorithms (SLAM) for mobile robots, we use at IGMR the indoor Global Positioning System from Nikon.
SLAM is a classical problem in mobile robotics and still a current and challenging research topic. The current developments are focused in improving SLAM algorithms with respect to a high accuracy, generality, and robustness. For this reason, we validate our SLAM algorithms for mobile robotics with the Nikon iGPS which is used to generate a ground truth with a frequency of 40 Hz and an accuracy of 0.2 mm. In this way, critical inaccuracies and loop closure methods can be much better quantified and analyzed.
Project page:
Bots2Rec
Contact person:
Simon Schläger
WAAM simulation with ROS in Gazebo
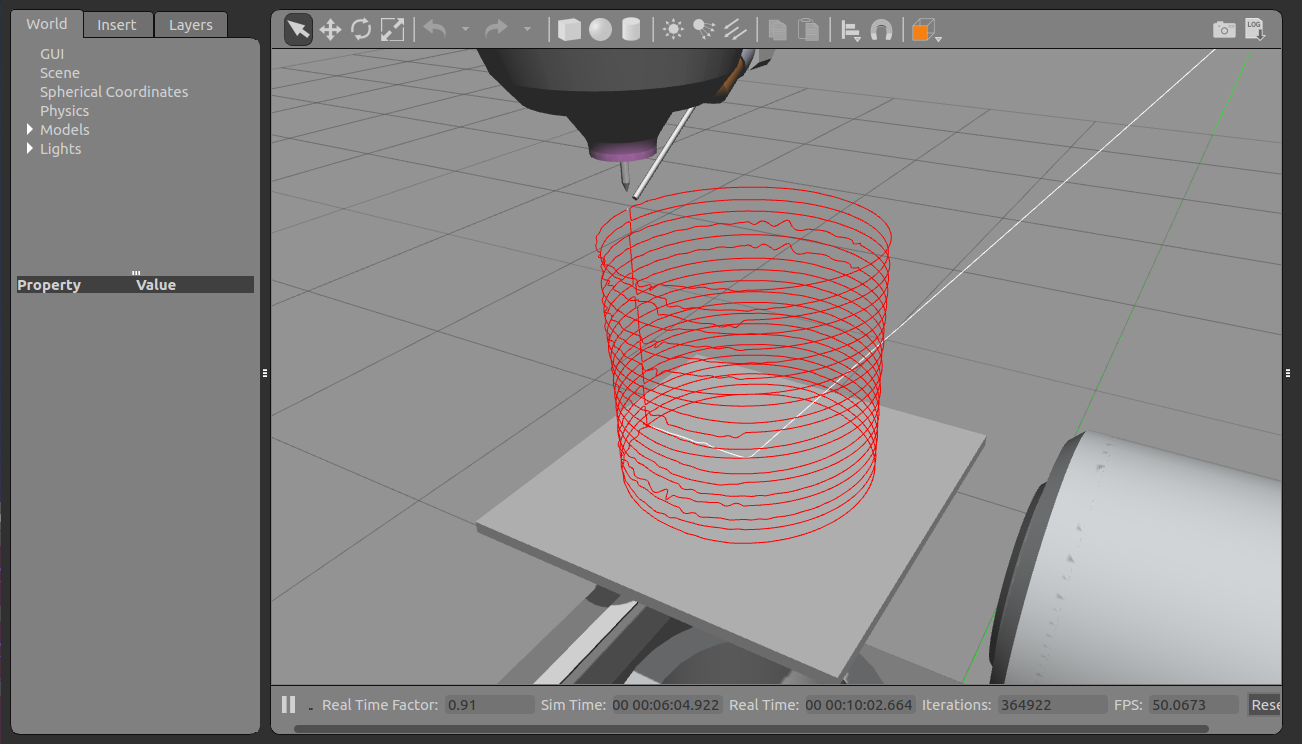
Vincent Brünjes designed a Gazebo plug-in in his master‘s thesis to simulate multidirectional wire+arc additive manufacturing processes.
Contacts:
Execution of the planned actions in CoppeliaSim
Implementation of ROS Action Interfaces to connect the AI task planning framework ROSPlan with the simulation software CoppeliaSim
Contact person:
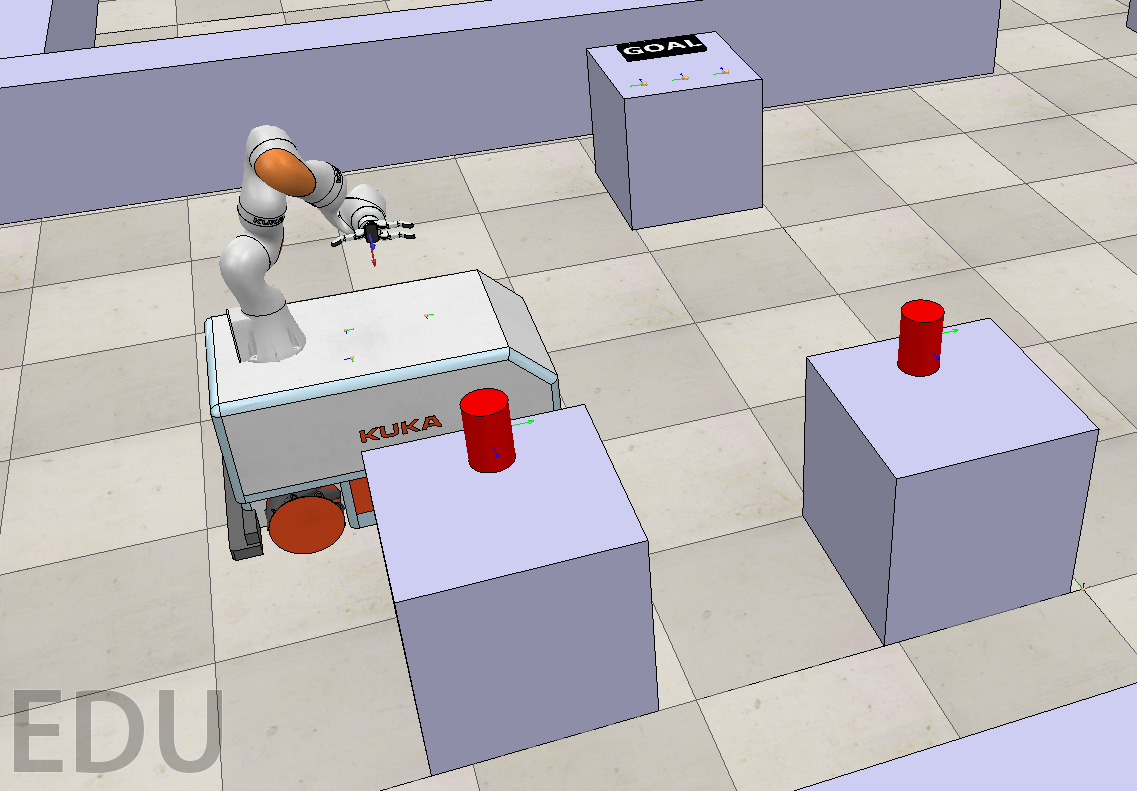
Task planning in industrial scenario
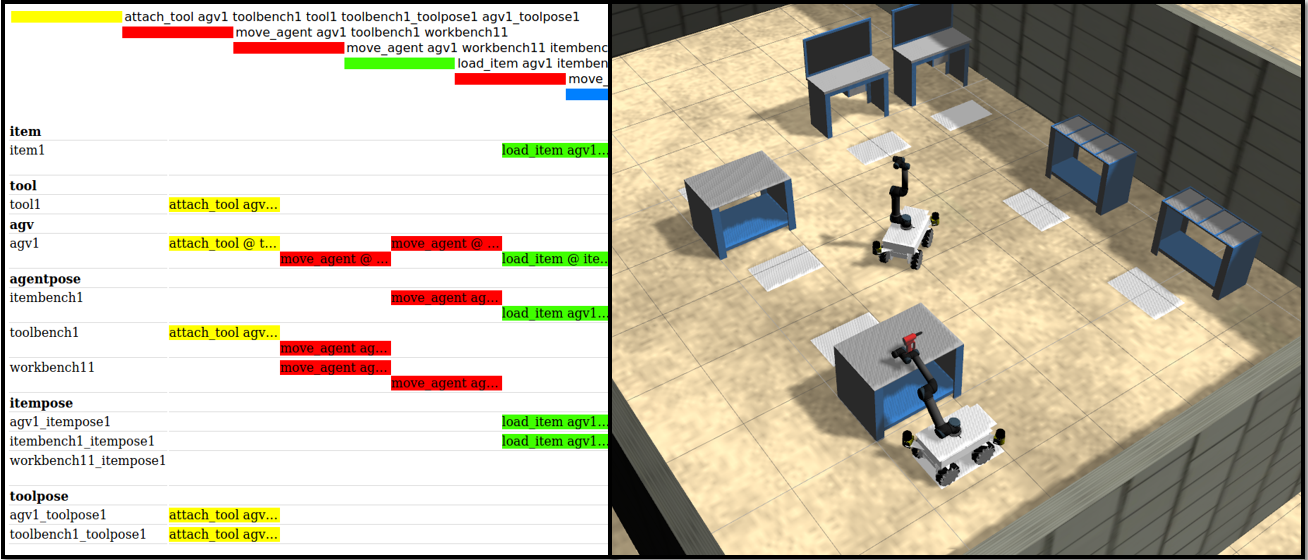
PDDL modeling, ROSPlan and Gazebo simulations are used to improve automatic scheduling algorithms for scenarios with collaborating actors.
Contact person:
Realistic simulations in Gazebo
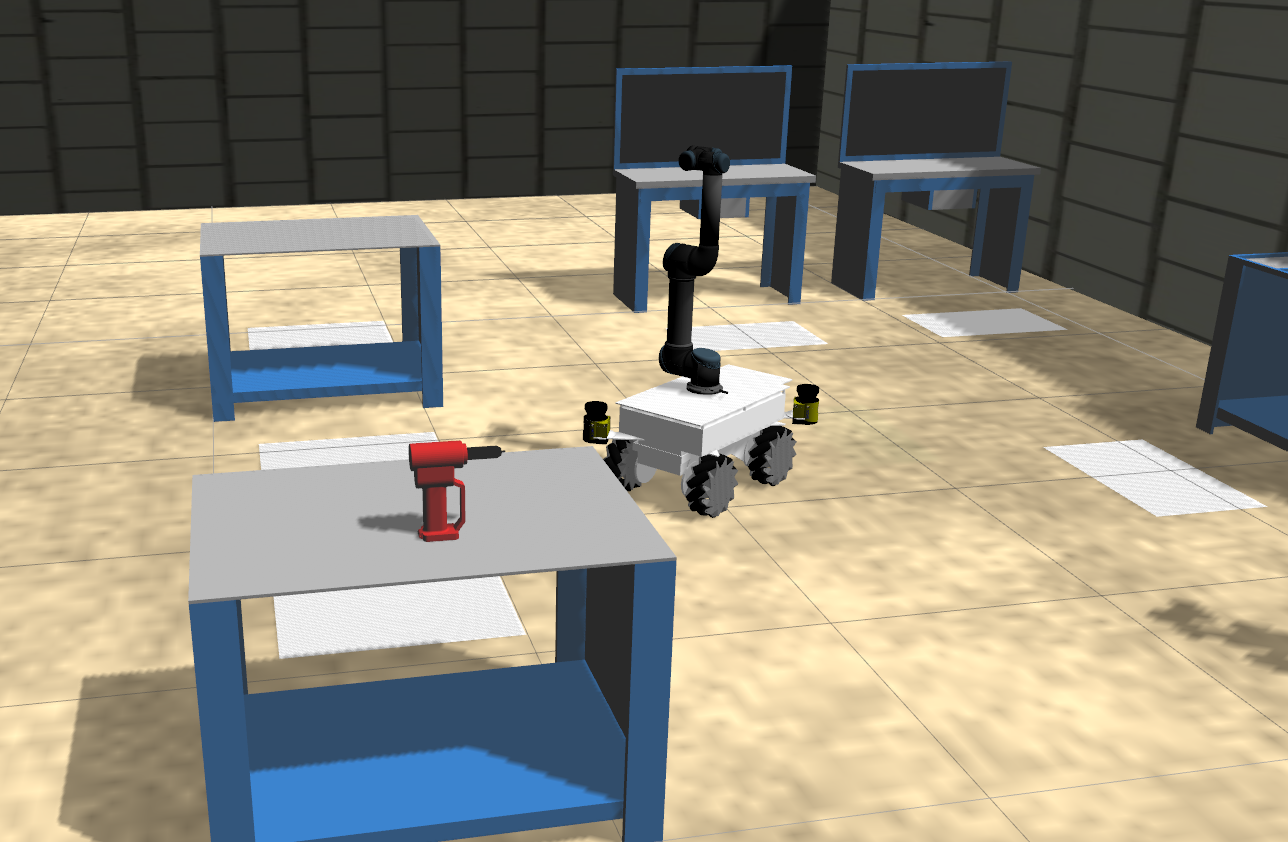
At IGMR we develop complex simulation environments. Textures make them visually more realistic in simulation program Gazebo!
Contact person:


